
Kruktapmechanisme
van de ornithoptermodellen EV1 tot EV6
Inhoud:
- 1. Kardan kruktapmechanisme algemeen
- 2. Glijvlucht-Krachtvlucht-overgang door
omkering van de draairichting van
de aandrijfmotor in het EV1 tot EV4 - 3. Glijvlucht-Krachtvlucht-overgang door
en stap schakelsysteem met een servo
in het EV5 en EV6 - 4. Traploze instelling van de slaghoek
met een hulpaandrijving - 5. Externe links
1. Kardan kruktapmechanisme algemeen
Met een Kardan kruktapmechanisme is het mogelijk om een roterende beweging in een rechtlijnige beweging om te zetten. Dit principe is in de 16e eeuw uitgevonden door de Italiaanse wiskundige Girolame Cardano.
Het kruktapmechanisme van Cardano bestaat hoofdzakelijk uit een tandwiel met binnenvertanding en een planeetwiel met een kruktap. De steekcirkel van het binnentandwiel is precies twee keer zo groot als het planeetwiel. Iedere kruktap op de steekcirkel van het planeetwiel maakt een lineaire beweging ten opzichte van een rechte lijn van het binnentandwiel.
Alleen de hoofdaandrijfas in het midden van het krukasmechanisme wordt door de motor aangedreven. De as van het planeetwiel is met deze as verbonden.
Voor het realiseren van een vleugelslagbeweging is slechts één kruktap nodig.
Voor een actieve verdraaiing van de slagvleugel zijn verschoven geplaatste kruktappen benodigd. De hoofdkruktap (blauw, volgende afbeelding) zorgt voor de slagbeweging en de in faseverschoven beweging van de stuurkruktap (lila) zorgt voor de vleugelverdraaiing of scheluwtrekking.
Bij de krachtvlucht ijlt de stuurkruktap altijd voor op de hoofdkruktap, net als de voorlijst van de vleugel ten opzichte van vleugelligger.
De loodrechte bewegingen van de beide kruktappen worden via kruissleuven aan de slagvleugel overgedragen. Voor de bevestiging zie Aandrijfmechanisme van de EV4.
In de glijvluchtpositie staan beide kruissleuven in het midden van hun slag en daarmee ook de slag- en de instelhoek van de vleugels.
Als de aandrijving tijdens de glijvlucht in een dood punt van de kruk wordt gestopt dan kan het in de loodrechte richting naar believen krachten van de vleugel opnemen. Een rem of blokkering van de krukdraaibeweging is daarom niet nodig.
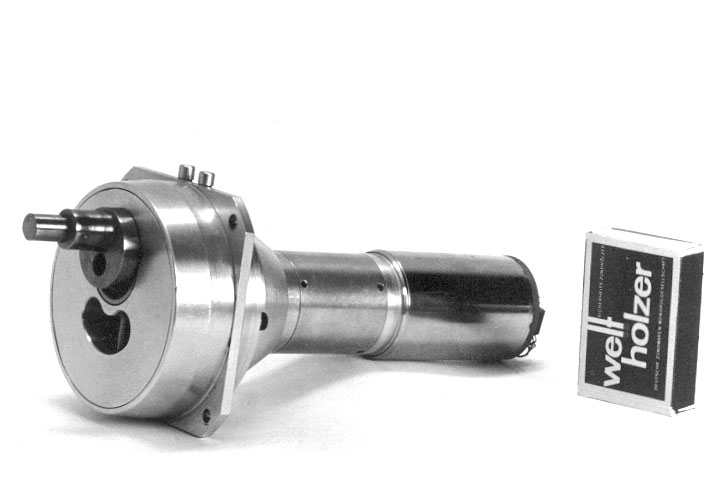
Cardan kruktapmechanisme
geproduceerd voor het EV1.
Deze speciale aandrijving, die bestaat uit resp. een elektromotor, een vertragingskast
en kruktapmechanisme, zet de draaiende beweging van de elektromotor (Nominaal ingangsvermogen 85 Watt) om naar
een lineaire op- en neergaande beweging van de kruktap. Een kruisleuf (scotch
yoke) wordt alleen gebruikt om te schakelen tussen de glij- en de vermogensvlucht.
- Glijden wordt bereikt door de kruktap
in het horizontale vlak te stoppen. - Vermogensvlucht wordt bereikt door de kruktap
in de verticale richting te bewegen.
Het tandwielhuis boven de twee pinnen voor de twee glijvluchtinstellingen te zien.

Hier kan men het verzet van 2 mm tussen de hoofd- en de stuurkruktap herkennen.

Tekening
van het kruktapmechanisme
Voor verdere gedetailleerde en technische informatie, zie:
- Tekeningen van de onderdelen
(PDF 1.4MB)
met 18 technische tekeningen in het Duits - Verslag over De ontwikkeling van de EV-slagvleugelmodellen (PDF 2.4MB)
- mijn patent DE 26 28 846 (applicatie 1976 externe link 1)
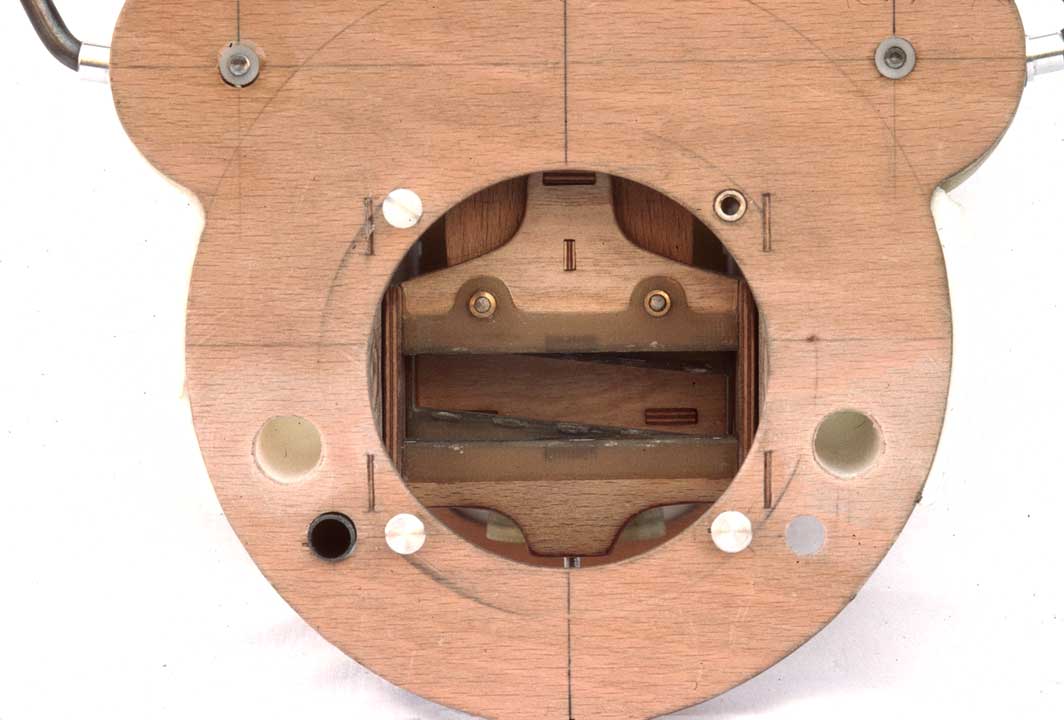
Aanzicht van de kruisleuf (scotch yoke)
in de aandrijfmechanisme van de EV4.
De horizontaal verlopende hoofdkruissleuf (met stalen glijvlakken) is goed
te zien. Ook de daarachter liggende schuinliggende stuurkruissleuf is nog
net te herkennen.
2. Glijvlucht-Krachtvlucht-overgang door
omkering van de draairichting van
de aandrijfmotor in het EV1 tot EV4
Bij iedere omkering van de draairichting van de aandrijving wordt binnenvertandingstandwiel 90 graden gedraaid. Het kan zich tussen de eindaanslagen vrijelijk bewegen.
Benodigd voor de omschakeling en instandhouding van de krachtvluchtinstelling van het binnenvertandingstandwiel is dat er een remmende werking bestaat bij de hoofdkruktap of zijn kruissleuf.
De bij de glijvlucht schuin verlopende baan van de kleinere stuurkruktap (stuurkruktap lila, hoofdkruktap blauw) is aan de hand van zijn kruissleuf goed te herkennen.
3. Glijvlucht-Krachtvlucht-overgang door
en stap schakelsysteem met een servo
in het EV5 en EV6

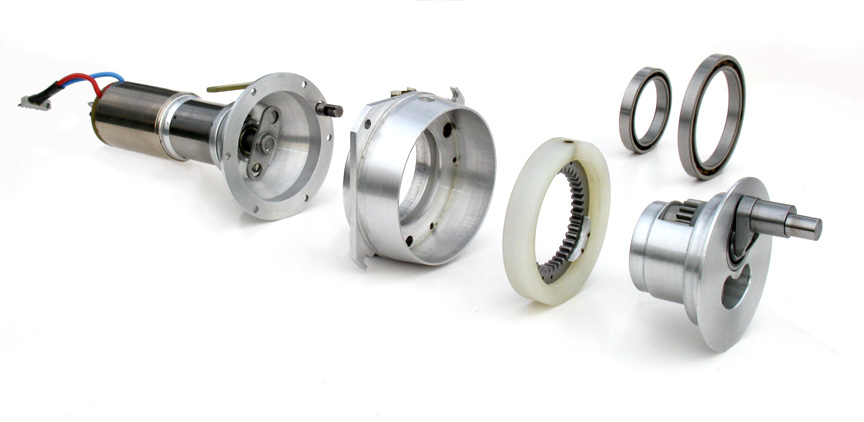
Omgebouwd kruktapmechanisme
De omschakeling tussen de glij- en krachtvlucht werd niet meer gerealiseerd
door middel van het omkeren van de draairichting maar door een servogestuurde
stappenschakeling van het binnentandwiel van
het kruktapmechanisme.
Dus deze variatie is ingesloten in het Tekeningen van de onderdelen (PDF 1.4 MB) met 18 technische tekeningen in het Duits.
Alleen tijdens de omschakeling tussen glij- en krachtvlucht is een constant aanwezige remmende kracht op de hoofdkruktap of de kruissleuf noodzakelijk. Aansluitend wordt de positie van het binnentandwiel vergrendeld.
4. Traploze instelling van de slaghoek
met een hulpaandrijving
Naast de hoofdaandrijving met slechts één draairichting is een hulpaandrijving, die van draairichting kan wisselen, noodzakelijk.
Het vermogen van de hulpaandrijving stelt zich in op de optredende krukkrachten en de gewenste stuursnelheid. De aandrijving is geschikt voor een korte inschakelduur.
De slaghoek van de vleugel is traploos instelbaar.
De banen van de hoofdkruktap in de separate stappen worden met een witte stippellijn aangegeven.
Bij deze variant was als hoofdaandrijving een dieselmotor en als hulpaandrijving een elektromotor gepland. Dit aandrijvingsconcept voor ornithopters is zeer bedrijfszeker omdat ook bij het uitvallen van de hoofdaandrijving de overgang naar de glijvlucht gerealiseerd kan worden.
Een dergelijke aandrijving met instelbare slag is tot dusverre nog niet gebouwd.
5. Externe links
- Here you can find informations about my patent specification
of the cardan gear mechanism with reversal of rotation direction (like section 2.):
https://depatisnet.dpma.de/DepatisNet/depatisnet?action=pdf&docid=DE000002628846C2
Both other variants of the crank I have not applied for a patent. - Cornell University, Kinematic Models for Design,
Hypocycloid Straight-line Mechanism:
http://kmoddl.library.cornell.edu/model.php?m=137