
Andere slagvleugelconstructies
Bij de constructie van ornithoptermodellen zijn er behalve het intensieve gebruik van de slagvleugeltheorie in hoofdzaak twee hoofdactiviteiten n.l het ontwikkelen van de aandrijving en het ontwikkelen van de slagvleugels. De brede interesse ligt in het algemeen bij de aandrijfsystemen en de componenten. Echter het hoofdprobleem bij de ontwikkeling van zo'n soort vliegtuig vormt toch wel het ontwerpen van de vleugels. In dit ontwerpgebied zijn de verschillen tussen wens en realiteit erg groot.
In het onderstaande wordt getracht een ruw overzicht te verschaffen over de fysische karakteristieken van bekende slagvleugels. Maar deze verzameling is verre van compleet.
Inhoud:
- 1. De vogelvleugel, het ideaal
- 2. Membraanslagvleugels
- 2.1 Het zeil als basisvoorbeeld
- 2.2 Eenvoudige membraanslagvleugels
- 2.3 Eenvoudige membraanslagvleugels
met zeillatten - 2.4 Actieve verdraaiing door voorliggerrotatie
- 2.5 Aëro-elastische verdraaiing door het liggermoment
- 2.6 Staartloze ornithopter
- 2.7 In tandem
- 2.8 Drijfvleugel
- 2.9 Oscillerende vaste vleugel
- 2.10 Rotorvleugels
- 2.11 Met niet-verdraaibare armvleugelsectie
- 3. Geprofileerde slagvleugels
- 3.1 Met kunstveren
- 3.2 Met een onder een hoek geplaatste
ophanging van de handvleugel - 3.3 Verdraaiing door het kantelen van de
voorlijst van de vleugel - 3.4 Met getrapte verdraaiing
- 3.5 Verdraaiing door
het slagbeweging
van de hulpligger - 3.6 Servogestuurde vleugelverdraaiing
- 3.7 Verschuivingsprincipe
- 3.8 Flappende vleugeltips
- 3.9 Schilvleugel
- 4. Externe links naar andere slagvleugelconstructies
1. De vogelvleugel, het ideaal
Natuurlijk is het grote voorbeeld voor de technische slagvleugels die van de natuurlijke vogelvleugel. Zijn grote effectiviteit dankt het aan het feit dat de gelede delen zich heel doelmatig kunnen bewegen en kunnen veranderen op een manier die zeker voor een lange tijd voor modelvliegtuigbouw onhaalbaar zal zijn. Dit geldt ook voor de verdeling van de vleugelbelasting en de gebruikte sensortechnieken.
In deze afbeelding van K. Herzog wordt de anatomische onderverdeling van de vogelvleugel in de hand- en armsectie getoond. Deze afbeelding kan ook heel goed worden gebruikt wanneer de techniek van de slagvleugels wordt besproken. De overlangse delen van deze vleugelsecties verschillen bij de diverse vogelsoorten aanzienlijk.
2. Membraanslagvleugels
Toepassingsgebied
Membraanslagvleugels zijn in staat om de richting van het profiel van de handsectie aan te passen aan de slagrichting. Op deze manier leveren ze veel stuwkracht en kunnen daardoor steil klimmen (vliegen met stuwkracht). Tot op heden zijn ze minder geschikt voor glijvluchten en voor het vliegen met lift.
2.1 Het zeil als basisvorm
Een zeil, hoewel op een andere manier toegepast, heeft bijna dezelfde functie als een slagvleugel. Het moet zoveel mogelijk stuwkracht leveren bij veranderlijke richtingen van de luchtstroom.
Door materiaalkeuze, samenstelling, onderverdeling en vormgeving kunnen de zeileigenschappen behoorlijk verschillen. Zeillatten geven het zeil meer stabiliteit en een optimale vorm. Over de fabricage van zeilen en hun praktische toepassing kan men veel beschrijvingen met belangrijke informatie vinden.
Er zijn inderdaad veel membraanslavleugelsystemen ontwikkeld, maar er is nauwelijks gedetailleerde informatie beschikbaar.
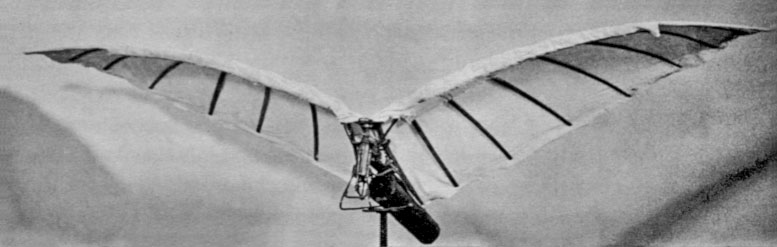
2.2 Eenvoudig membraanslagvleugels
De Aandrijfvleugels
van ![]() Alexander Lippisch (ca. 1937) waren
duidelijk geoptimaliseerd voor de opwekking van aandrijfkracht. Daarom werd
de koorde aan het uiteinde van de vleugels zeer groot uitgevoerd. Deze vleugelaandrijving
was niet bedoeld om ook tegelijkertijd lift op te wekken.
Alexander Lippisch (ca. 1937) waren
duidelijk geoptimaliseerd voor de opwekking van aandrijfkracht. Daarom werd
de koorde aan het uiteinde van de vleugels zeer groot uitgevoerd. Deze vleugelaandrijving
was niet bedoeld om ook tegelijkertijd lift op te wekken.
Tim
is het eerste rubbermotor aangedreven slagvleugelmodel met eenvoudige
membraanslagvleugels dat in massa is geproduceerd. Het model is uitgevonden
door Albertini Prosper en de Ruymbeke Gérard (Frankrijk 1969).

De tekening op de membraanvleugels van de Tim is getekend door K.
Herzog.
Onder de benaming Tim Bird
is het model tot op de
dag van vandaag nog te koop.
2.3 Eenvoudig membraanslagvleugels met zeillatten
Hierboven wordt het fameuze membraanslagvleugelmodel, voorzien van smalle zeillatten
ten
behoeve van stabilisatie, getoond. Het model is ontwikkeld door A. Pénaud
(Frankrijk 1872). Voor meer informatie ga naar externe link 1
2.4 Actieve verdraaiing door rotatie
van de voorligger
Membraanslagvleugels, ontwikkeld door Erich von Holst / Karl Herzog (1963) met door de aandrijving geregelde verdraaiing van armvleugel door voorliggerrotatie. Alleen de laatste rib van de armvleugel (nummer 9) is vast bevestigd aan de ligger. Deze is verbonden met een krukasaandrijving die zowel de slag- als ook de draaibeweging van de ligger bewerkstelligd.
Het verdraaien van de handvleugel is grotendeels passief. Daarbij kan de dwarsbeweging van de latten kruislings ten opzichte van de lengteas worden gezien. Ondanks de veranderende profielwelving gedurende de slagperiode wordt een relatief doelmatige toename van de vleugelverdraaiing richting de vleugeltip gerealiseerd.
De vogelmodellen van K. Herzog (1963) gebruiken dit principe ook.
2.5 Aëro-elastische verdraaiing
door het liggermoment
Het slagvleugelmodel van de Tjech Cenek Chalupsky (1934), met zijn aëro-elastische verdraaiing over de hele lengte van de vleugel door een liggermoment, vloog heel stabiel zonder staart. Het bereikte een aanzienlijk klimvermogen dat tot op de dag van vandaag nog als opmerkelijk mag worden beschouwd.
- gewicht
- spanwijdte
- rotan ligger
- bekleding
- hoogte
- 3,1 kg
- 2 m
- linnen
- 10-15 m
Iedere slagvleugel van deze ornithopter heeft twee liggers. De rechte, buigstijve ligger (H1) brengt de kracht van de slagbeweging over. De gebogen, torsie-elastische ligger (H2) bepaalt de mate van vleugelverdraaiing.
Beide ligers kruisen elkaar ongeveer op de halve spanwijdte. Op het kruispunt zijn ze flexibel met elkaar verbonden. Om te voorkomen dat de torsie-elastische ligger (H2) bij de vleugeltip niet teveel naar achteren buigt, is tussen de liggeruiteinden hiertoe een draad of een elastiek gespannen.
Bij de neergaande vleugelslag worden de liftkrachten groter. De ligger (H2) en de vleugel verdraaien ten opzichte van elkaar. De mate van verdraaiing past zich aan de grootte van de liftkracht en de liggrstijfheid aan. Ze geschiedt derhalve dan ook aëro-elastisch.
Gelijktijdig met de verdraaiing buigt bij de neergaande slag het uiteinde van de ligger (H2) zich naar boven. Als reactie daarop buigt deze zich aan de andere kant van de liggerkruising - dus in het arrmvleugelbereik - naar achteren door. Op deze manier worden de eisen aan de slagbeweging doeltreffend verbeterd.
Zie het Literatuurverwijzingen ![]() Piskorsch Adolf (1975):
Piskorsch Adolf (1975): Druklucht-Slagvleugelmodel
Chalupsky
en de video van de externe link 2
2.6 Staartloze ornithopter
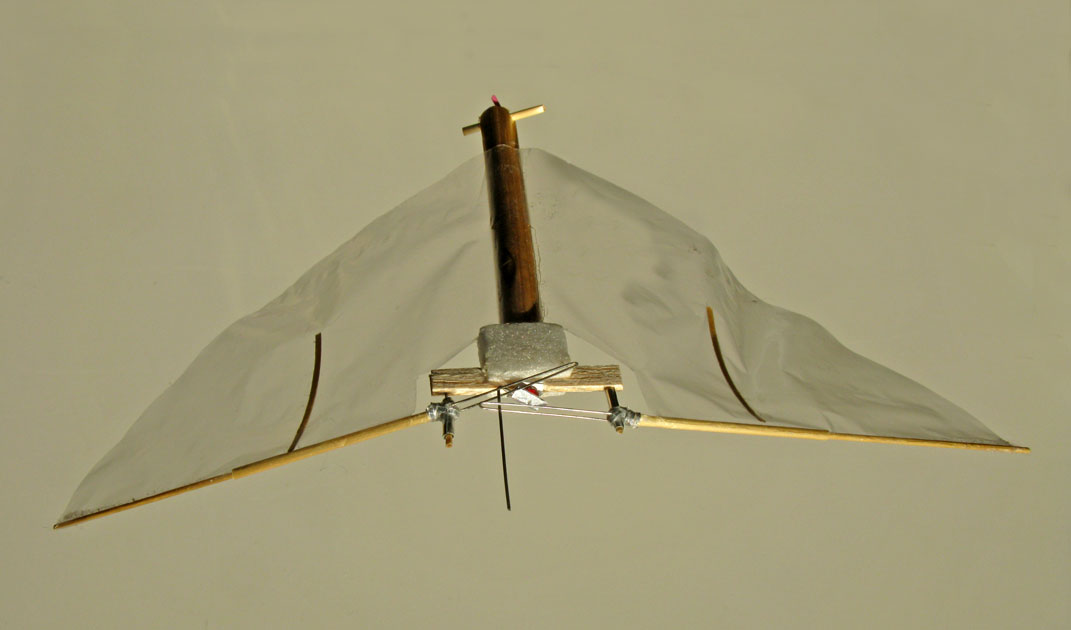
Ornithopter zonder staart, ontwikeld door Jean_Louis Solignac (Frankrijk 2000).
Het slagvleugelmodel Kleiner Vogel
heeft een zeer eenvoudig en licht aandrijfmechanisme
en wordt door een rubbermotor aangedreven. Bij een spanwijdte van 15 cm heeft
het slechts een gewicht van 0,6 gram. De met dit model bereikte vliegeigenschappen
zijn verbazingwekkend goed (voor het bouwen van dit slagvleugelmodel). zie
ook externe link 3
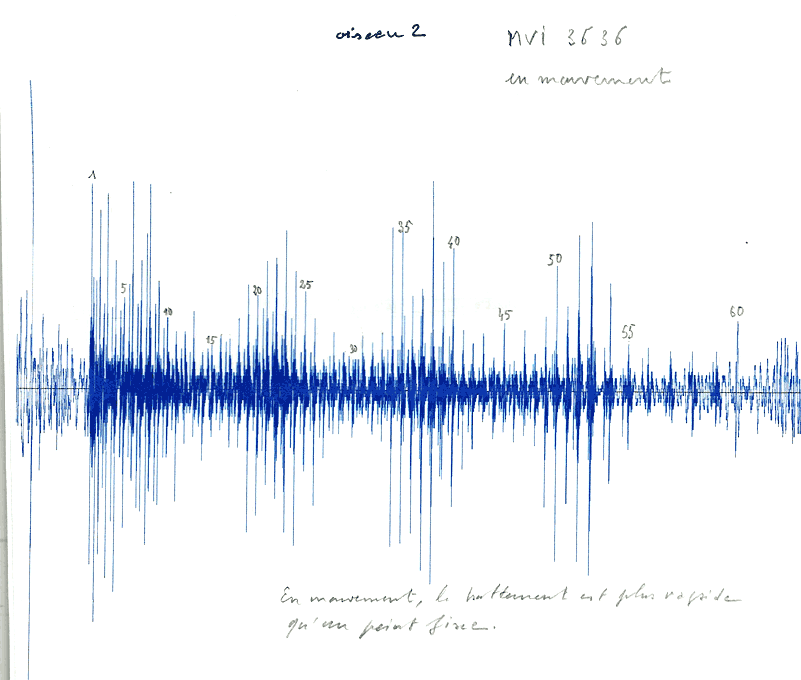
Acoustic recording of the flapping wing noises of Kleiner Vogel
.
This can be used to determine the flapping frequency.
Het bijzondere aan deze slagvleugels is het door zeillatten gerealiseerde, naar onder gewelfde vleugelprofiel. Daardoor vliegt het model ook zonder staart stabiel. Dit is theoretisch op basis van de drukpuntsverandering van dunne profielen te verklaren en kan met de hiernaast staande test met een papieren model worden uitgeprobeerd.

Behoudt men de zwaartepuntsafstand d
van de vleugelneus, zoals die van
een papieren vliegtuig aan, dan vliegt ook een licht balsa-staartloos model
heel goed.
2.7 In tandem
Ornithopters met twee sets slagvleugels zijn gebaseerd op een libelle en ontwikkeld door E. v. Holst (1940) / K. Herzog (1963).
Voor het vereenvoudigen van het aandrijfmechanisme zijn de twee tegenovergestelde vleugelhelften vast met elkaar verbonden. Op deze manier wordt het drukpunt gefixeerd tussen de twee vleugels.
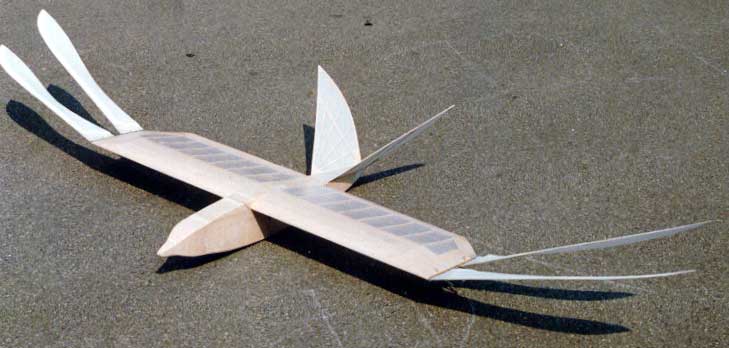
Met deze tandemopstelling met vleugels die in tegenovergestelde richting bewegen kan de vertikaal op en neer bewegen van de romp worden tegengegaan. Dat heeft echter het nadeel dat de achterste slagvleugel in de wervelstroming van de voorste terecht komt. Alleen bij kleine vleugels, met name bij kleine Re-getallen zou dit eventueel een voordeel kunnen zijn. Slagvleugelmodel van Horst Händler (1988)
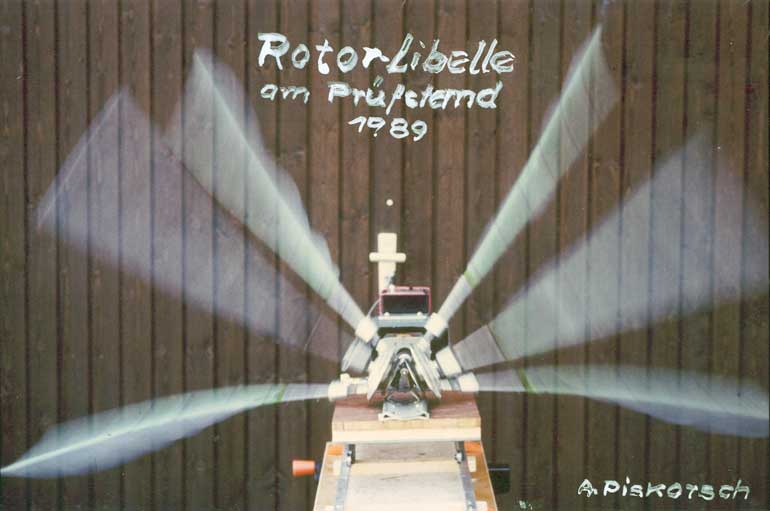
2.8 Drijfvleugel
Bij de mechanisatie van het vliegprincipe van een libelle heeft ![]() Erich von Holst (1948) zijn aangedreven
vleugelmodel met twee, zich in tegengestelde richting draaiende driebladige
vleugels ontwikkeld (zie fragment op de video van de drijfvleugel)
Erich von Holst (1948) zijn aangedreven
vleugelmodel met twee, zich in tegengestelde richting draaiende driebladige
vleugels ontwikkeld (zie fragment op de video van de drijfvleugel)

De slaghoek in één richting is gelijk aan 180° en de gehele slagperiode is 360°. Drie in plaats van twee vleugelbladen per rotor leveren een constante lift kracht
In tegenstelling tot een propeller levert de propellervleugel ook een liftkracht die loodrecht staat op de stuwkracht. Men hoeft alleen de drijfkracht/ voortgangs-verhouding te verhogen (v/u). Net als bij een slagvleugel moet er gevlogen worden met een kleine positieve invalshoek ten opzichte van de de as van de stuwkracht.
Dit is een mooi voorbeeld van de innovatieve omzetting van een biologisch naar
een technisch principe. Het vakgebied Bionica
bestond toen echter nog
niet.
Zie ook de configuratie van het rubbermotor aangedreven model ENTOID
(2007) van Velko T. Velkov in de externe link 4.
2.9 Oscillerende vaste vleugel
Stuwkracht kan ook opgewekt worden door het oscillerend bewegen van de complete vaste vleugel. Hierbij moet de lift kracht tijdens het omhoog gaan kleiner zijn dan tijdens het neergaan. Hoe groter het verschil is, des te beter is dat voor de stuwkracht (zie het vliegprincipe/vector diagram). Verder is normaal gesproken een continue instelling van de invalshoek noodzakelijk.
Hier wordt een heel simpele opwekking van een overeenkomstige oscillerende beweging van de vleugel gerealiseerd door het gebruik een om as draaiende roterende massa, bestaande uit een hoofdveer en een tandwiel. In dit geval is de vleugel aëro-elastisch verdraaibaar. Dit idee is bedacht door B. W. Mituritscha (waarschijnlijk uit Rusland, 1953).
Jammer genoeg vertoont de vleugel een voor- en achterwaartse beweging tijdens deze beweging. Dit kan echter worden tegengegaan door een tweede tegenovergesteld werkend contragewicht.
Er zijn verschillende voorstellen om een oscillerende beweging te realiseren door de piloot zelf, in een zeilvliegttuig of een Ultra-Light, bijvoorbeeld door middel van snel opdrukken of kniebuigingen.
Entirely different model experiments with oscillating
wings shows Karl-Heinz-Helling with his Double flapping wing airplane
(2008, externe link 5).

In principle, the driveless Zeppelin Phoenix
generates propulsion in
the same way with its wings, by its own up and down motions. British engineers
have developed it since 2016 (please look at externe link
6). Also, hot-air balloons can become a little manoeuvrable with such
wings during ascent and descent.
2.10 Rotorvleugels
Om acceleratiekrachten te voorkomen bij de eindposities worden soms slagvleugels gebouwd die ronddraaien in een conusachtige houder waarvan het drukpunt bij de vleugelwortel ligt.
{kind=link}

het modelvliegtuig van Horst Händler (1989). Bij het model zijn de beide einden van de aandrijfas geknikt. De vleugels zijn er vrij draaibaar opgeplaatst. De instelhoeken worden door de aan de vleugel naar boven uitstekende hefbomen geleid.
2.11 Met niet-verdraaibare vleugelsectie

Membraanslagvleugels van P. H. Spencer met een niet verdraaiende armvleugelsectie en een passief verdraaiende handvleugelsectie. Vanuit aërodynamisch oogpunt gezien ontstaat er binnen het bereik van de armvleugels, door de aan de achterzijde gemonteerde handvleugels alsnog een soort verdraaiing. Bij de neergaande slag vermindert en bij de opgaande slag vergroot hij de lift op de armvleugel. Dit ondersteunt de liftverschuiving, maar vereist negatieve lift in het hele handvleugelgebied in het opgaande slag.
De armvleugel heeft een driehoekig vorm en heeft een grote koorde bij de vleugelwortel.
het arm- en handmembraan overlappen elkaar in de richting van de vleugelspanwijdte.
Het is duidelijk dat de handvleugelligger een kleine slag kan maken in het
handgewricht. Daarna wordt de handkoorde weer groter (zie ook de constructie
van de Aandrijfvleugels
van Alexander Lippisch).
Deze Deadalus-achtige slagvleugel van de zeemeeuw werd ontwikkeld door Percival H. Spencer (USA 1958, zie externe link 7).

Tegenwoordig wordt dit principe van slagvleugels met ingevoegde zeillatten heel vaak toegepast.
3. Geprofileerde slagvleugels
Toepassingsgebied
Geprofileerde slagvleugels met respectievelijk aan beide zijden beklede vleugels zouden met een zeer hoge efficiëntie kunnen werken. Met hun meestal relatief lage slagfrequentie en het kleine bereik van de liftcoëfficïent van eenvoudig vleugelprofiel kan maar weinig stuwkracht worden geleverd. Tenminste als er zoveel mogelijk lift moet worden geproduceerd voor het vliegen met lift. Daarom zijn geprofileerde slagvleugels met name geschikt voor een horizontale vlucht, de soepel toenemende stijgende klimvlucht en natuurlijk bij het omschakelen naar de glijvlucht.
3.1 Met kunstveren

Om het verdraaien te vergemakkelijken kan het gesloten vleugelprofiel worden open gespreid. Dit wordt tot nu toe in het bijzonder bij grote mandragende slagvleugelconstructies toegepast.
In de volgende afbeelding wordt een slagvleugel met gespreide vleugeltips van
de bemande Zwaan 1
, die werd ontwikkeld door Walther Filter (1955,
getoond op de Hannover Messe 1958). De invalshoeken van de veren, die ontworpen
zijn als vleugels, zijn bestuurbaar (zie ook de externe link
8).
Zelfs voor de schuif- en de spreidbeweging van de
veren
bestaan oude ontwerpvoorstellen. In tegenstelling daarmee zijn
bij de EV7b slechts
simpele toepassingen met veren uitgevoerd.
Een ander voorbeeld van toepassing van kunstveren
is te zien bij de Ikarus
van Emiel Hartman (Engeland 1959).
Meer recentere experimenten met kunstmatige veren vindt men bij de Vogelman
Georges Fraisé (Frankrijk 2005, zie ook de externe
link 9).
3.2 Met een onder een hoek geplaatste ophanging van de handvleugel
Een speciale uitvoering van een slagvleugel komt van K. Herzog (1963). Bij deze vleugel staan zowel de rotatie- en de verdraaiingsas niet haaks op de slag-as.
De armvleugel zou de slagbeweging en een verdraaiingsbeweging moeten uitvoeren in het schoudergewricht. Met behulp van rubberbanden tussen de arm- en handvleugel wordt de laatste een beetje naar beneden getrokken (aëro-elastische vleugel).
Dit is ook al een eerdere suggestie voor een door gewrichten verbonden slagvleugel met een aanvullende slagbeweging van de handvleugel.
De knik van het profiel tussen de arm- en de handvleugel ligt op ongeveer hetzelfde punt als bij de bovengenoemde membraanvleugel van P.H. Spencer.
3.3 Verdraaiing door het kantelen
van de voorlijst van de vleugel

Het kenmerk van de ;verstelbare propeller
van
John Drake zit in het verdraaien van de voorligger en niet de achterlijst
van de slagvleugel. (Engeland, testvluchten 1978)
3.4 Met getrapte verdraaiing

Een benaderde vleugelverdraaiing kan ook worden gerealiseerd door een stapsgewijze rotatie van relatief niet verdraaibare vleugelsecties.
Het model EV4 (1979) werd ook zo uitgerust met zo'n soort rotatie van de enkele vleugelsecties. Echter in dit geval werden de rotaties bestuurd door de vleugelaandrijving.

Een typisch voorbeeld van een passieve stapsgewijs
verdraaide vleugel is de Stapverdraaier
met zijn foamvleugels (Depron)
van Karel Pustka (2004). De ontstane ruimte tussen de vleugelsecties wordt
afgedekt met een membraan.
3.5 Verdraaiing door de
slagbeweging van de hulpligger
Hier wordt de vleugelverdraaiing gerealiseerd door
een in faseverdraaide slagbeweging van de hoofd- en de hulpligger (ontwikkeld
door Emile Räuber, Frankrijk 1909).

Deze technologie is ook gebruikt bij de EV2 (1976). In de bovenstaande afbeelding is de afzonderlijke aandrijving van de twee liggers te zien.
De functie is overeenkomstig met die van een libellevleugel. Ook hierbij bepaalt de faseverschuiving van de slagbeweging van de hoofd- en de hulpligger de grootte van de vleugelverdraaiing.

Bovendien werkt de libelle klaarblijkelijk met een ligger aan de vleugelneus. Zijn faseveschoven slagbeweging opzichte van de beide andere liggers beïnvloedt de profielwelving.
De steunen c.q. verbindingen van de drie liggers aan het lichaam zijn hiet duidelijk als donkere, gedeeltelijk zich kruisende structuren op de rug van de libelle te herkennen (zie ook de externe link 10).
3.6 Servogestuurde vleugelverdraaiing
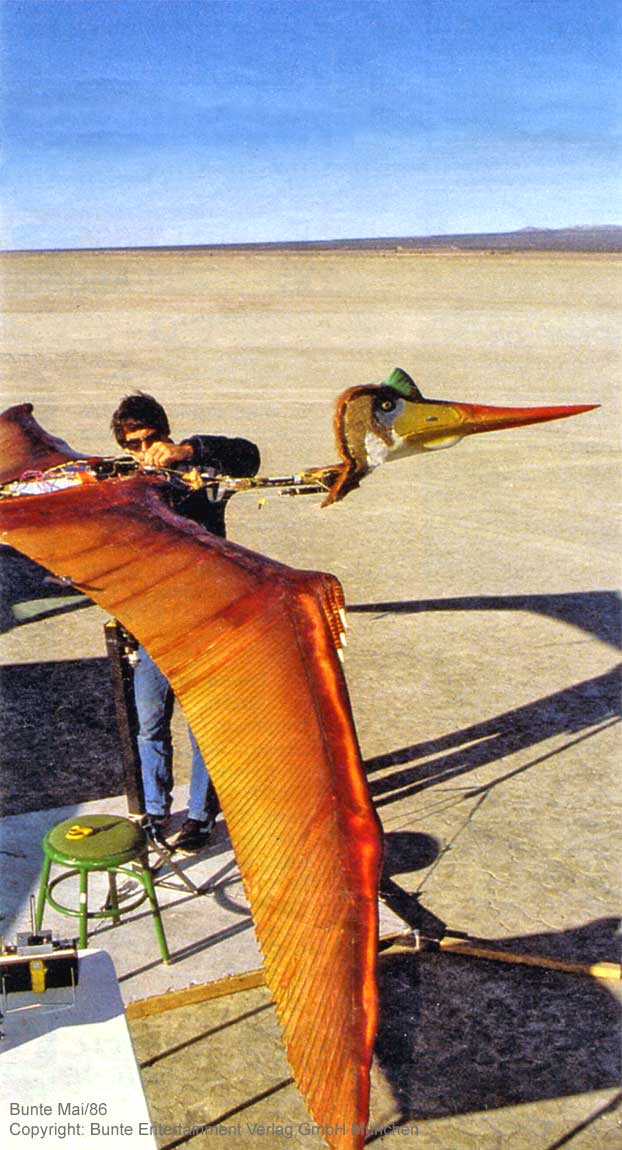
Dat is een vliegwaardige en natuurgetrouwe kopie van een vliegende saurier-
eines Quetzalcoatlus Northropi (QN).
De aërodynamica van deze ornithopter zou volkomen overeen moeten komen
met het origineel. Het idee daarvoor stamt van het creatieve genie Dr. Paul
MacCready (USA 1985).
De vleugelverdraaiing wordt door servo's gestuurd en de vliegpositie wordt door heen- en weergaande bewegingen van de vleugeltips en door knikbewegingen van de kop gestabiliseerd.
Details, ook voor het werkingsprincipe, zie het krantenartikel (in het Duits)
over het project van ![]() Paul MacCready en verdere informatie
via externe link 11.
Paul MacCready en verdere informatie
via externe link 11.

Ook bij de Smartbird
van de fa. Festo wordt de verdraaiïng van
elke vleugelzijde met een servo gestuurd (2011). In ieder geval wordt daarmee
slechts de verdraaiïng in het handvleugelgebied beïnvloed. Het binnenste
armvleugelgebied is niet verdraaibaar. Het draagvermogen van deze slagvleugel
is daarom relatief laag in verhouding tot het vleugel oppervlak.
De spanwijdte is 2 meter en de gewicht 0,450 kg, oppervlakbelasting 9 N/sqm.
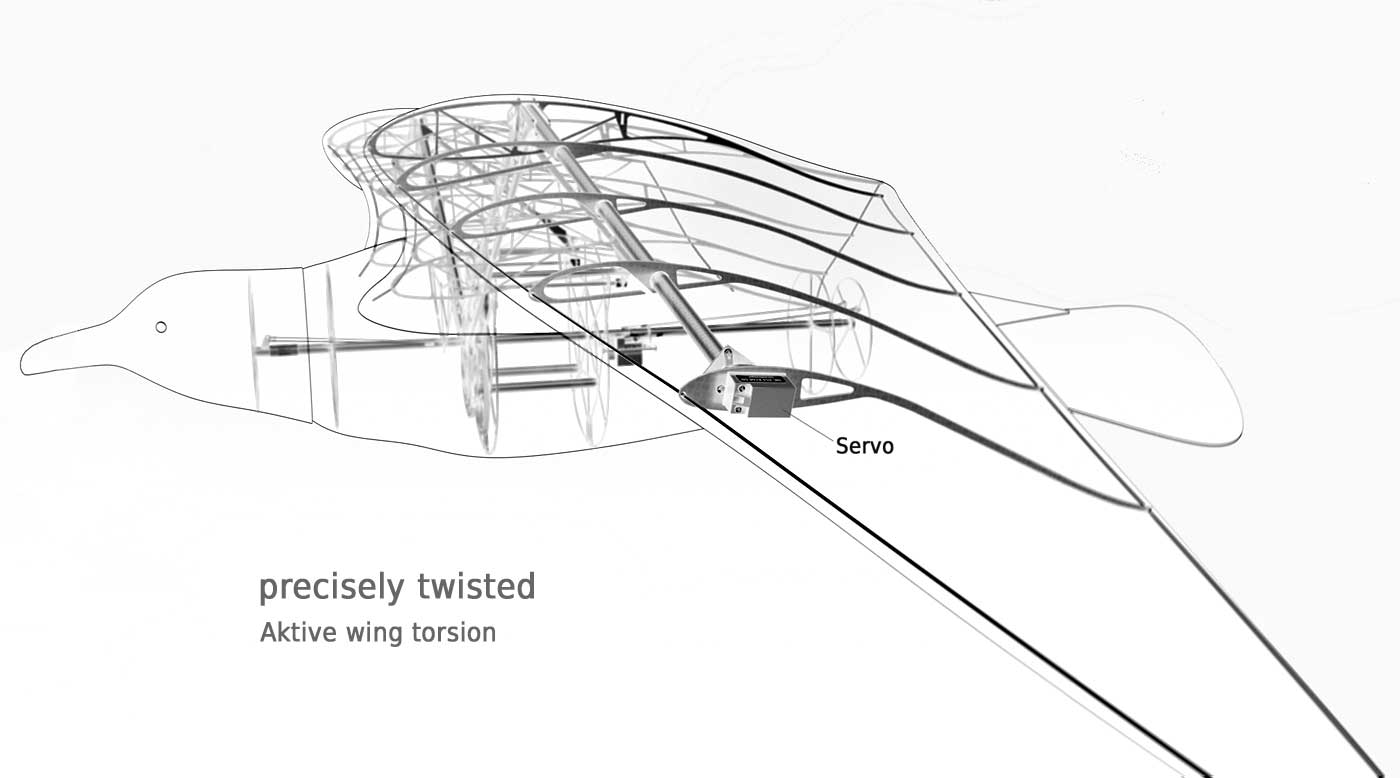
De bekleding bestaat uit een 2 mm dikke, geëxtrudeerde Polyurethaanschuimplaat, die die als een vleugelprofiel wordt gebogen (de bij het model gebruikte vleugel- doorsnede is anders dan de hier afgebeelde vleugelribben).

Boven- en onderkant van de bespanning zijn in het bereik van de handvleugel achter niet met elkaar verbonden. Ze kunnen daarom langs elkaar heen glijden en de vleugel de verdraaiïng rimpelloos volgen (zie dwarsverdraaiïngs- principe bij de volgende doorsnede).
Bij de Smartbird valt op, dat met het vleugelmechanisme de beweging tussen arm- en handvleugel wordt nagebootst. De hiernaast getoonde afbeeldingen tonen een principiële overeenkomst met het slagvleugelmechanisme gedurende de opgaande- en de neergaande slag. U kunt hiervan ook nog een animatie (2,1 MB) bekijken (voor meer details over het SmartBird-project zie externe link 12).
{kind=link}
3.7 Verschuivingsprincipe

In dit geval gaat het om een aëro-elastische verdraaibare geprofileerde
slagvleugel volgens het ;Shearflex principe
. Dit systeem maakt het
mogelijk een relatief niet-elastische bekleding toe te passen. Als de verdraaiing
langs de vleugel constant is en niet te groot dan blijven de contouren van
het vleugelprofiel erg goed.
Hier wordt de verdraaiingselasticiteit hoofdzakelijk bepaald door de voorlijst
van de vleugel. Dit systeem is ontworpen door Professor ![]() James D. DeLaurier en Jeremy M. Harris,
Canada 1994.
James D. DeLaurier en Jeremy M. Harris,
Canada 1994.
De ornithopter met zijn uit drie delen bestaande slagvleugel is ook erg interessant. Jeremy M. Harris 1977 heeft het aangemeld als patent.

Op de hiernaaststaande foto zijn James D. DeLaurier en Jeremy M. Harris met hun 3-meter radiografisch bestuurde en van een verbrandingsmotor voorziene model, agfebeeld. Een langere vlucht werd in 1991 gerealiseerd. Hiervan bestaat een video-opname (zie externe link 13).


Hier wordt een vergelijkbare replica van Horst Händler (1994) afgebeeld, uitgevoerd met een elektrisch aandrijfsysteem.
3.8 Flappende vleugeltips



Bij de Snowbird heeft de hoofdligger van de vleugel geen slagscharnier. In plaats daarvan is de ligger elastisch en realiseert bij een vertikale slagbeweging met de vleugeltips de gewenste vleugelbeweging. De vleugels verdraaien dan passief door de aerodynamische krachten.
Het principe van een met draden aangedreven vleugelslag heeft in het bijzonder voor mandragende ornithopters duidelijke voordelen:
- uitvalzekere vleugelpositie voor de glijvlucht
- geschikt voor grote spanwijdten met overeenkomstig lage geïnduceerde weerstand
- slechts weinig bewegende delen
Todd Reichert heeft de Snowbird nadrukkelijk meeontwikkeld en heeft er ook
succesvol mee gevlogen (Canada 2010).
Voor meer informatie ten aanzien van de mens-aangedreven ornithopter (HPO)
project SnowBird
zie externe link 14.
3.9 Schilvleugel

Een schilvleugel met actieve vleugelverdraaiing door een door de aandrijving bestuurde liggerrotatie (ontwikkeld door Albert Kempf, Frankrijk 1998, zie externe link 15).
De bovenzijde van de vleugel, die van hardschuim is vervaardigd, is aan de bovenzijde en aan de onderzijde gewelfd en vormt op die manier een vleugelprofiel.
Een lange dunne plaat met een gewelfde doorsnede kan eenvoudig worden verdraaid en gevouwen. Ook de hiervoor genoemde shearflexvleugel past deze eigenschap toe. Deze slagvleugelcatagorie wordt een voorgevormde vleugel genoemd.

De zo uitgeruste Truefly
die wordt getoond in
de bijgaande afbeelding heeft een prachtig vliegbeeld. Het was ook de eerste
ornithopter met voorgevormde profielslagvleugels die een steile klimkarakteristiek
liet zien.
Verwijzing
In de korte studie Slagvleugel
ontwerpen
(in het Duits, PDF 1.8MB)
kan aanvullende informatie betreffende dit soort vleugelontwerpen worden gevonden.
In samenhang hiermee kan informatie betreffende de voor de EV-modellen ontwikkelde vleugels gevonden worden op pagina: Gewricht-slagvleugel.
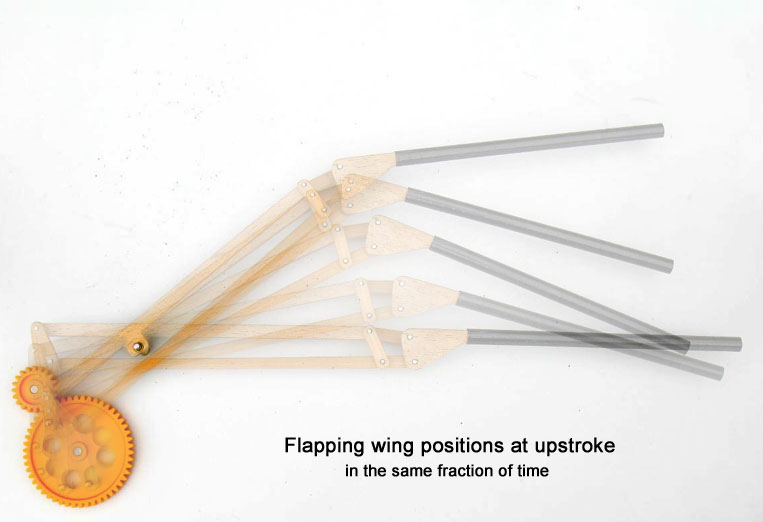
Ideas and suggestions for a further development are enclosed in the paper Lift during wing upstroke, version 10.1, (PDF 1,0 MB).
4. Externe links
naar andere slagvleugelconstructies
- Alphonse Pénaud (1850 - 1880):
https://web.archive.org/web/20190321124850/http://www.ctie.monash.edu.au/hargrave/penaud.html - Video van een slagvleugelmodel van Cenek Chalupsky:
http://ovirc.free.fr/Clips_video.php - Bouwwijze van het slagvleugelmodel van Jean-Louis Solignac:
http://ovirc1.free.fr/solignac-ornitho.htm - Drijfvleugelmodel ENTOID van Velko T. Velkov:
http://velkovelkov.blogspot.com/2009/09/entoid.html - Het dubbel-slagvleugelvliegtuig van Karl-Heinz Helling vliegt:
https://www.modellbau-thiele.de/schlagfluegel.htm
http://www.mfc-rossendorf.de/fileadmin/user_upload/Projekt/Hubfluegel/Projekt/SchlagfluegelProjekt.htm - Zeppelin without drive motor
The Phoenix UAV
developed by the Centre for Process Innovation, National Printable Electronics Centre.
In the video from the spot 19:29 (in German):
https://www.br.de/mediathek/video/gut-zu-wissen-19102019-pakete-per-lastenrad-stand-up-paddling-und-zugvoegel-fliegen-ohne-motor-av:5d78dc721f300600137ecc7c - Informatie over Percival H. Spencer:
http://www.seabee.info/spencer.htm - De
Schwan 1
van Walther Filter in het luchtvaartmuseum Hannover-Laatzen,
te zien biiAir-Britain
:
https://abpic.co.uk/pictures/view/1166050 - Gespreide vleugels van de
Vogelman
Georges Fraisé:
http://ovirc.free.fr/GFraise.php - Opname van dichtbij van een oranjekleurige libelle:
http://www.grahamowengallery.com/photography/dragonfly_photography.html - Namaken van een Pterosaurier von Paul McCready:
http://ovirc.free.fr/McCready.php
The Great Pterodactyl Project:
http://calteches.library.caltech.edu/596/2/MacCready.pdf (1.6MB) SmartBird
van de fa. Festo (fabriek- en procesautomatisering):
https://www.festo.com/group/de/cms/10238.htm- Video vom Flug des Modells der Machbarkeitsstudie
für einen bemannten Ornithopterflug von James D. DeLaurier:
http://www.ornithopter.net/MediaGallery/Videos/index_e.html - Human-Powered Ornithopter (HPO) Project
Snowbird
van Todd Reichert.
http://hpo.ornithopter.net/
Technical informations with a general drawing of theSnowbird
:
http://www.aerovelo.com/snowbird-technical-info/
Todd Reichert's doctoral research studyKinematic Optimization in Birds, Bats and Ornithopters
https://tspace.library.utoronto.ca/handle/1807/31913 - Ornithopter model
Truefly
van Albert Kempf:
http://truefly.chez.com/