
Ornithopter models EV5 and EV6
1. Ornithopter model EV5

- first flight
- wing span
- weight
- wing area
- wing loading
- aspect ratio
- airfoil
- 1981
- 2.70 m
- 5.2 kg
- 1.02 sq m
- 5.1 kg/sq m
- 7.3
like bird
- [106 in]
- [183 oz]
- [1580 oz]
- [16.7 oz/sq ft]
The fuselage of the EV4 were used again in the EV5. The fuselage was extended and a T-tail unit was added like the EV1. The inner (arm) wing was actively twisted and the twisting of the hand wing was aeroelastic. The wing linkage had to be adjusted accordingly.
The transition between glide and power flight was no longer done by reversing the direction of rotation, but by a servo controlled step switching system of the internal gear of the cardan gear mechanism.
1.1 Wing design

The EV5 arm wing was actively twisted by the forward spar. The back main spar of the hand wing was hinged. This facilitated the aeroelastic twisting of the hand wing.

Turning and twisting of the arm wing
In the wing root fairing of the EV5 one can see the mechanism
to link the wing. This caused the turning of the wing root and with
the turning of the main spar the twisting of the arm wing.
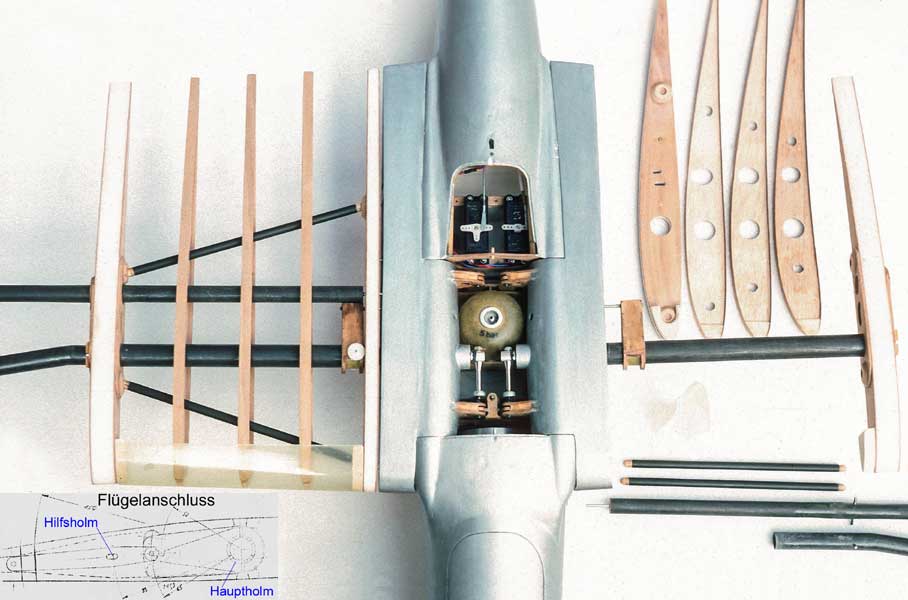
Turning and twisting of the arm wing
According to the sketch of the wing-fuselage connection the rear wing
spar was moved separately up and down at the wing root. On this way he
effected the twisting of the arm wing.
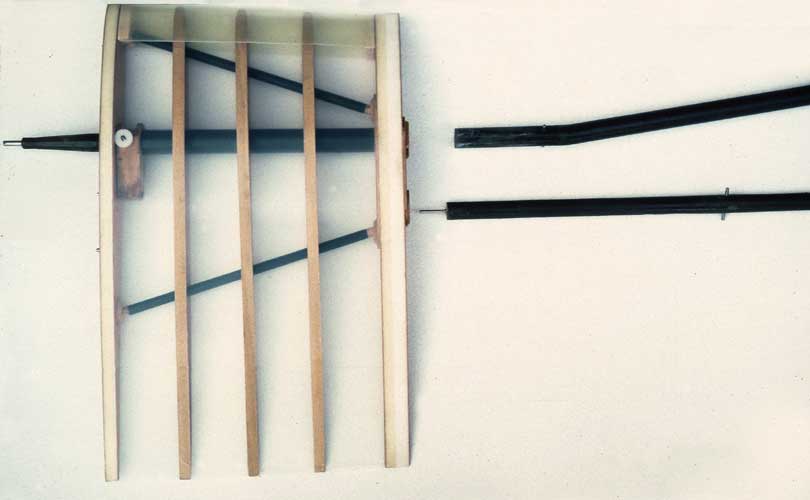
Upper arm of the wing demounted
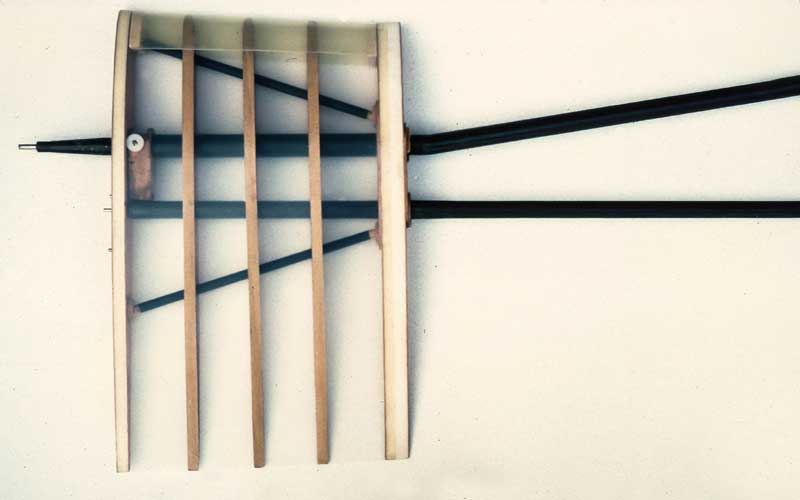
Upper arm of the wing mounted
The rear spar was tiltable pivoted in the rib at the elbow.

Karl Herzog
.. as an advisor during flight experiments with the EV5
2. Ornithopter model EV6

- first flight
- wing span
- weight
- wing area
- wing loading
- aspect ratio
- airfoil
- 1983
- 2.90 m
- 5.2 kg
- 1.13 sq m
- 4.6 kg/sq m
- 7.4
- CLARK Y (11,7)
- [114 in]
- [183 oz]
- [1752 sq in]
- [15.1 oz/sq ft]
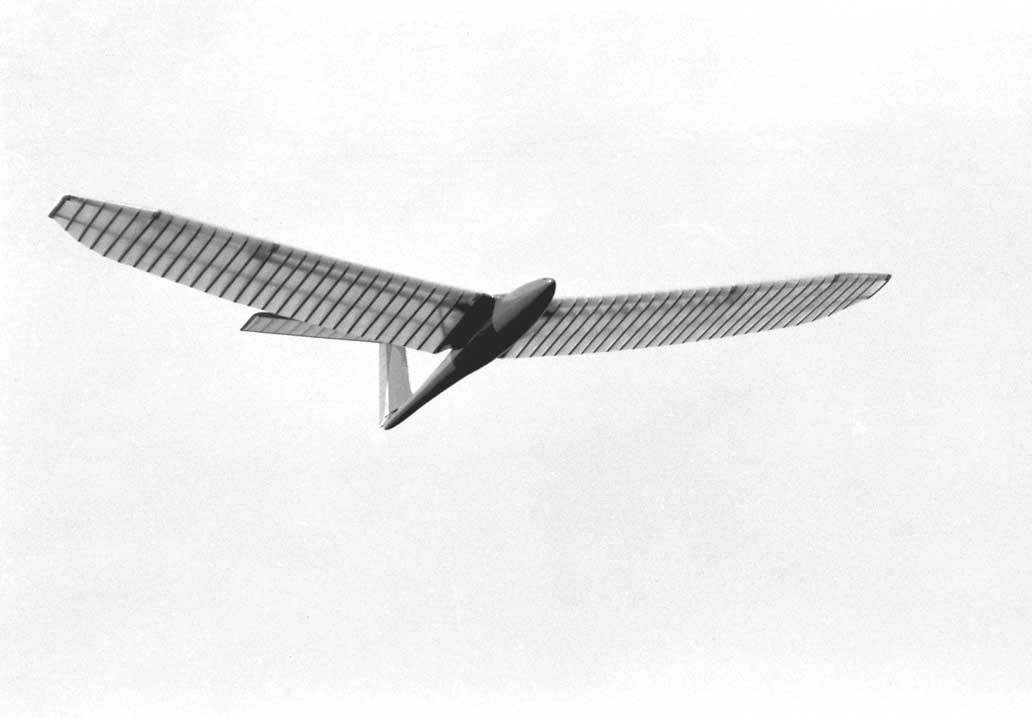
2.1 Flight photographs of the EV6

Here the EV6 with the fuselage and the tail unit of the EV5 but with new wings and a new pivot point of the wing. The twisting along the whole wing has been controlled by the aeroelastically bending of the hand wing.
Wing twisting in gliding flight
First the angle of attack along the span must be adjusted.

One can estimate the twisting of the wing based on the trailing edge. In this pictures it is alright.
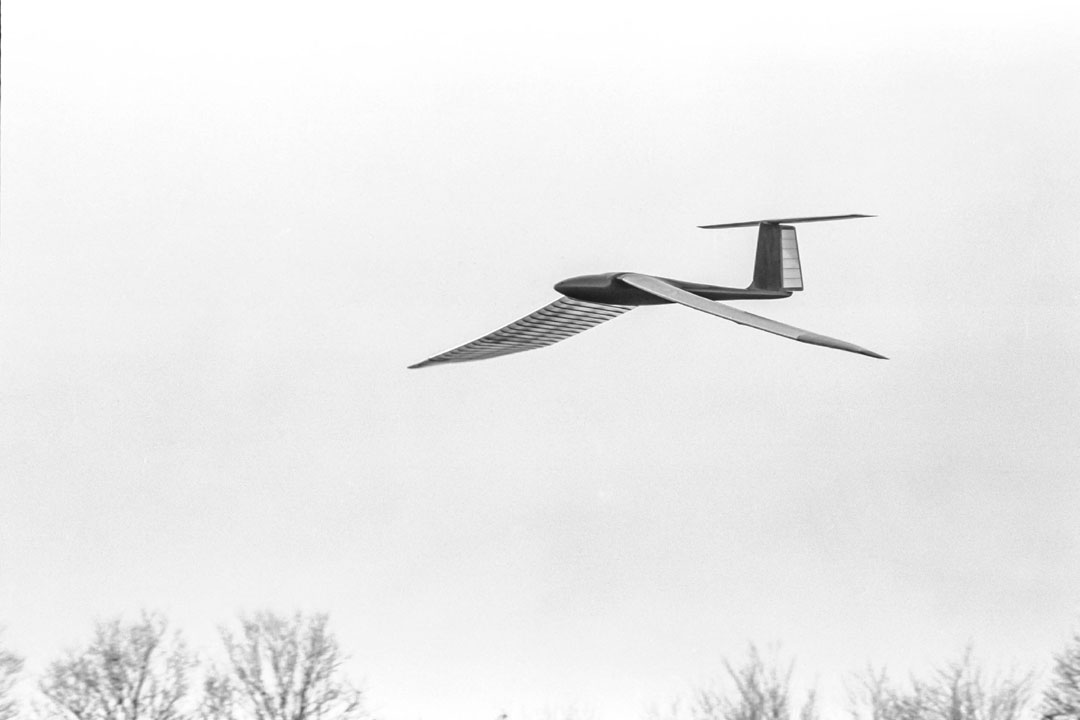
Fly-by of an ornithopter


EV6 during upstroke
with a relatively constant twisting along the whole wing. Thus, the angle
of incidence grows linear towards the wing tip.

EV6 during downstroke
There is also a constant twisting along the whole wing.
Even at that time first calculations were made for optimal distributions
of lift of up- and downstroke. But then the photos did not illustrate
the necessary increasing of twisting out to the wing tips.

Here a view to the trailing edge.

Overshoot of the angle of attack
In the range of the upper final wing stroke position the twisting of
the hand wing increases too much. This is caused by inertia of the trailing
edge during braking the movement of the upstroke and accelerating in the
opposite direction. The increasing lift at the end of the upstroke supported
this mistake.
When the wing comes to a standstill at the end of the stroke in the interest of lift and thrust the angle of attack should be like gliding. But there are also advantages to the overshooting (please look at handbook, chapter 6.8 and 6.9).

Articulated flapping wing
This is the EV6 with his articulated
flapping wings without a rigid trailing edge. Because of missing lifting
forces the hand wings are bent down by springs.
2.2 Video of the EV6 (1983)

The video shows two short flight sequences.
Scene 1
- a launch to gliding flight on a slope,
- the change to powered flight with a cardan gear mechanism,
- the slight bobbing up and down of the fuselage with a stroke cycle of about 0.8 s
- and after some wing beats the change to gliding flight. Then the flight speed obviously wasn't big enough for a normal gliding flight thereafter. Therefore, it changes to a sinking flight.
Scene 2
- a start to a gliding flight on a slope again and
- two transitions between gliding and powered flight
- The second switch does not happen speedily, most likely due to the indecisiveness of the radio-control pilot.
In both flights the varying acceleration in both operating cycles of the wings is clearly to be seen, at the rhythmically alternating distance between the model and marginal border of the image.
| download |
640 x 480 mp4 (1.6MB) |
480 x 360 mp4 (0.9MB) |
320 x 240 mp4 (0.5MB) |