
Gewindespindelantrieb
des Ornithoptermodells EV8
1. Komponenten

Kugelgewindetrieb
Für die Umwandlung einer rotierenden in eine lineare Bewegung wird beim
EV8 ein Kugelgewindetrieb
verwendet. Eine entsprechende Technik hat bereits Paul MacCready 1985 bei
seinem Flugsauriermodell QN
eingesetzt (Details zu seinem Antriebsprinzip
siehe ![]() Zeitungsartikel über sein Projekt).
Zeitungsartikel über sein Projekt).
Bei den hier gewählten Abmessungen ist darin, bezogen auf eine Schlagperiode, eine Drehzahluntersetzung von 38:1 enthalten. Der Wirkungsgrad für beide Umwandlungsrichtungen beträgt etwa 0,9. Diese hervorragenden Eigenschaften waren ausschlaggebend für die Antriebs-Neuentwicklung. In jeder Schlagperiode werden damit aber zwei Motor-Drehrichtungswechsel erforderlich. Dieser Vorgang entspricht dem Drehrichtungswechsel bei kleinen, Servo-angetriebenen Ornithoptern.
Hinweis:
Anstelle der Kugelgewindespindel kommt auch ein Ball Reverser Actuator
in Betracht (siehe weiterführender Link 1).
Der Elektromotor muss dann die Drehrichtung nicht mehr wechseln.
Neuentwicklung
Wird so ein Spindelantrieb heute von Fachleuten gebaut, kann er sehr kompakt
und effektiv sein (siehe weiterführender Link 2).

Auftrieb-Kompensationsfeder
Anstelle der bisher bei den EV-Modellen üblichen,
aufpumpbaren Gasdruckfeder mit Rollmembrane (siehe Antriebsmechanik
vom EV4), wird beim EV8
eine Industrie-Gasfeder verwendet. Deren Federkraft ist zwar leider nicht
mehrfach auf Null einstellbar (z. B. für den Testlauf des Antriebs),
aber ihre Federrate ist sehr klein.
Bei großen Federkräften in Verbindung mit einer kleinen Federrate bieten Gasfedern gegenüber entsprechenden Stahlfedern Vorteile. Sie haben eine kleinerer Bauform und ein geringeres Gewicht - aber auch höhere Verluste.
Bei guter Energierückführung über den Kugelgewindetrieb und
den Motorsteller in den Antriebsakku kann diese sogenannte Kompensationsfeder
später auch entfallen.

Motor
Zu Beginn der EV8-Entwicklung wurde wegen seinem
relativ kleinen Massenträgheitsmoment ein bürstenloser Motor vorgesehen
- damals noch mit Sensoren.
Nach der Modellfertigstellung gab es aber noch keine Drehzahlsteller mit ausreichend kurzer Verzögerungszeit bei Drehrichtungswechsel. Es musste daher auf einen Kollektormotor umgerüstet werden.
Heute gibt es aber auch für bürstenlose Motoren Drehzahlsteller mit hier ausreichend schneller Drehrichtungsumkehr.
Die berechnete, mittlere Flügelantriebsleistung vom EV8 betrug etwa 67 Watt. Unter Berücksichtigung aller Verluste lag die mittlere Motor-Eingangsleistung bei 127 Watt (Maximalwert einer Schlagperiode 199 Watt).


Elektronik
Im Zuge der Erprobung von nebenstehendem Versuchsaufbau fiel die Entscheidung
zur Ausführung mit einem programmierbaren Logikbaustein - auch PLD oder
Mikrocontroller genannt. Mangels ausreichender Programmierkenntnisse konnte
ich anfangs aber nur etwa die Hälfte dieser Hardware durch Software ersetzen
(siehe nebenstehendes Logikschema).
-
- Download
BASIC-Programm
(zip 8 KB)
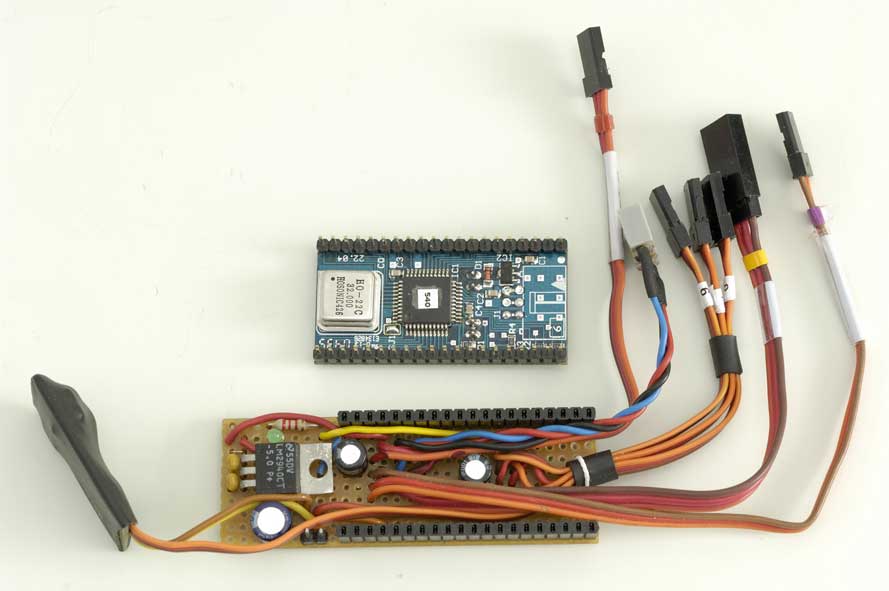
Inzwischen sind aber die Mikrocontroller so schnell und leistungsfähig geworden, dass man selbst mit einer einfachen BASIC-Programmiersprache alles in einem Chip unterbringt. Mit dem abgebildeten Steuercomputer kann man Antriebe für Schlagfrequenzen bis etwa 8 Hz ansteuern.
2. Antriebsmechanik

Antrieb-Einzelteile
Man sieht hier im Vordergrund die bei EV-Modellen
übliche Schaukel
(Sperrholzrahmen) zur Lastverteilung auf die
beiden Flügelanschlusswalzen. Dahinter liegt das erstmals beim EV8
für die Mechanik konzipierte Chassis.
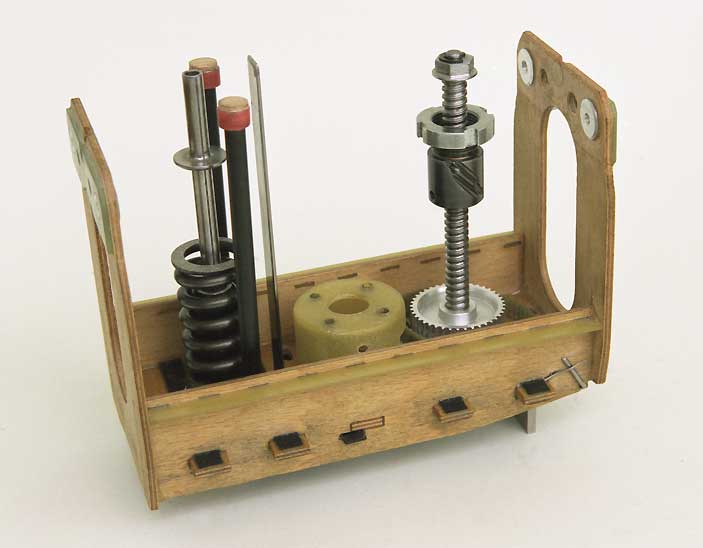
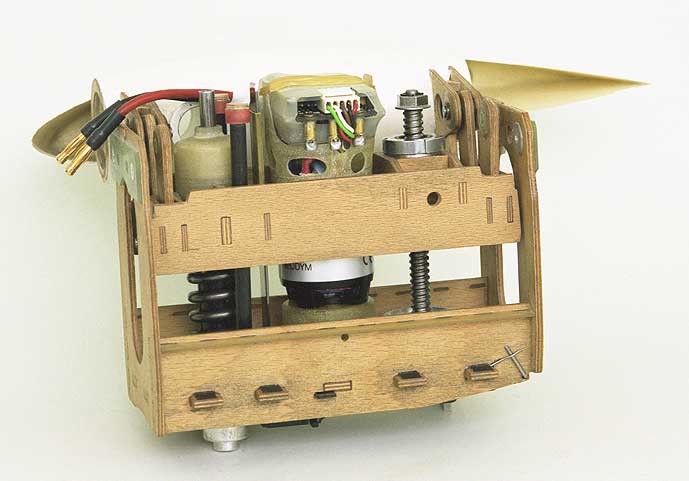
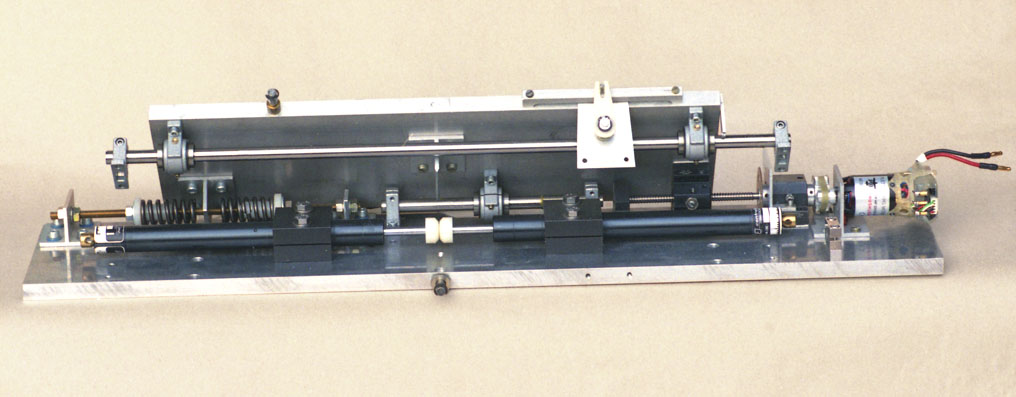
Chassis
mit Gewindespindel, Federn und Führung, aber noch ohne Motor. Es ermöglicht
den Antrieb als Ganzes in den Rumpf ein- und auszubauen. Die Gasfeder dient
als Führung der Stahlfeder.

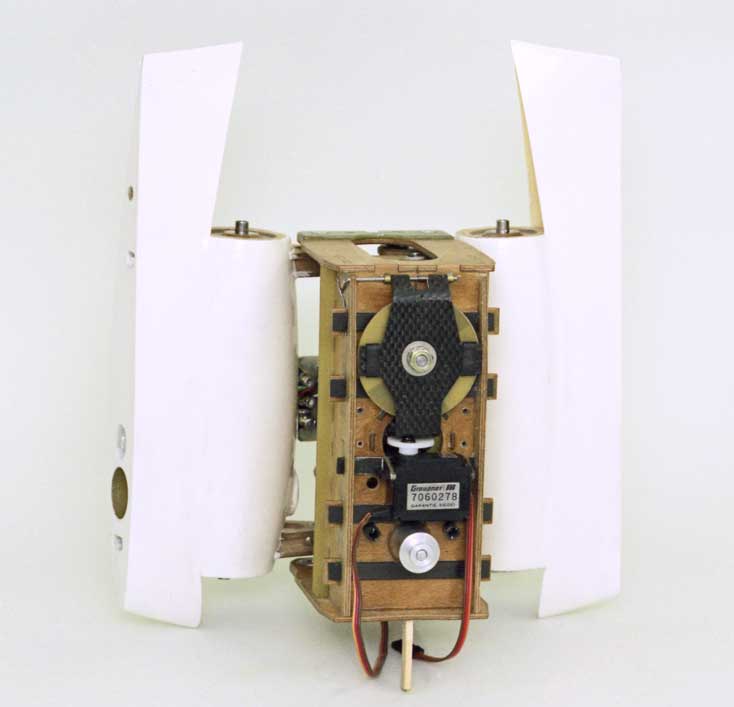
Ansicht von vorn

Ansicht von hinten
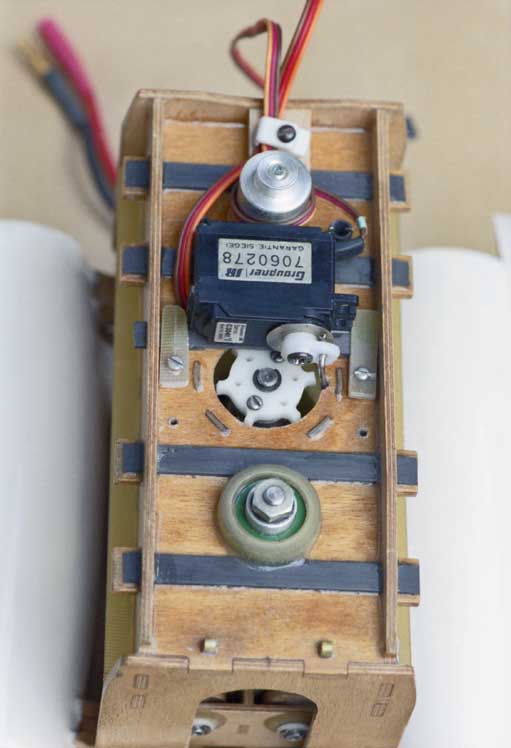
Ansicht von unten
Die oben abgebildete Bremsmechanik wurde schon im Zuge der Gleitflugversuche
umgebaut. Ihre Bremskraft war für Hochstarts zu gering. Gleichzeitig
wurde der damit verbundene digitale Umdrehungszähler durch einen analogen
Stellungsgeber (Potentiometer) ersetzt.
Antriebseinheit komplett
Der Antrieb ist als komplette Einheit relativ einfach in den Rumpf ein- und
ausbaubar, Gewicht 440 g (ohne Flügelanschlusswalzen). Die gesamte Elektrik
ist im vorderen Rumpfteil untergebracht.
Konstruktion
Die gesamte Konstruktion des EV8 erfolgte mit CAD.
Dadurch konnte mit vertretbarem Aufwand eine sehr kompakte Bauweise erzielt
werden.-
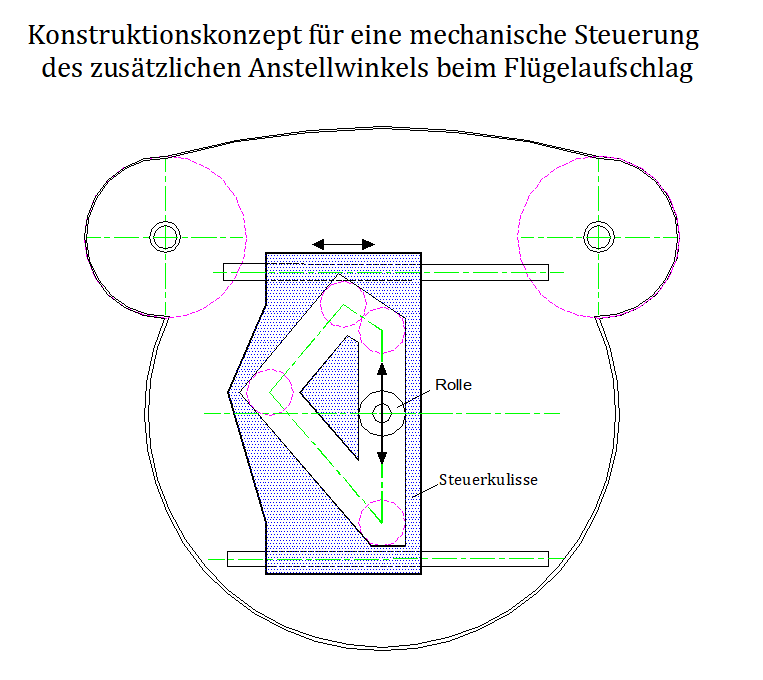
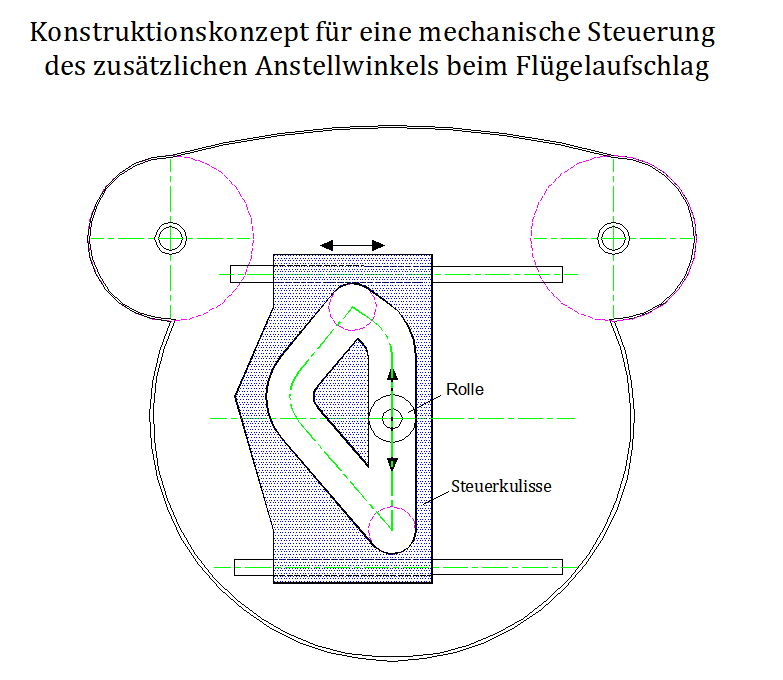
Steuerung des Anstellwinkels beim Flügelaufschlag
Konstruktionskonzept für eine mechanische Steuerung des zusätzlichen
Anstellwinkels beim Flügelaufschlag (Bild von der Führungsbahn
mit gerundeten Ecken, wegen der Massenträgheit). Die Form der Führungsbahn
entspricht etwa dem Verlauf des Anstellwinkels α in dem Aufsatz Auftrieb
beim Flügelaufschlag, Version 10.1, Bild 21, PDF 1.0 MB.
Gegen Ende des Abschlags wird der Auftrieb im Bereich der Flügelspitze kleiner. Wenn gleichzeitig der Anstellwinkel nahe der Flügelwurzel größer wird, so übernimmt auf diese Weise der Armflügel den Auftrieb vom Handflügel. Bei Vögeln wird dadurch eine schnelle, selbsttätige Umkehr der Schlagbewegung des Armflügels und eine dazu passende, passive Abwinklung des Handflügels ermöglicht. In der unteren Schlagendlage ist also der Anstieg des Anstellwinkels nahe der Flügelwurzel für eine gut funktionierende Auftriebsverlagerung erforderlich. In der Rechnung wird diese wichtige Funktion vernachlässigt.
- Die Einheit aus Antrieb und Flügelmittelstück (AF) ist im Bereich der Flügelendleiste so im Rumpf gelagert, dass sie für einen zusätzlichen Anstellwinkel der Flügelwurzel (z. B. + 6 Grad) nach oben geschwenkt werden kann.
- Die Rolle bewegt sich durch den Schlagflügelantrieb auf und ab.
- Die seitliche Bewegung der Steuerkulisse wird für die Steuerung des zusätzlichen Anstellwinkels beim Flügelaufschlag verwendet. Sie muss entweder durch einen Hebel, einen Bowdenzug oder durch eine Schnur in eine Auf- und Abbewegung der AF nahe der Flügelvorderkante umgewandelt werden.
- Die seitliche Bewegung der Steuerkulisse muss leicht gängig und verkantungsfrei in einer Führung erfolgen, die am Antriebsrahmen befestigt ist.
- Im Bereich der Schlagendlagen muss die seitliche Bewegung der Steuerkulisse
unterstützt werden. Bei Umlauf der Rolle entgegen dem Uhrzeigersinn,
- nahe der oberen Rollenendlage nach links,
z. B. durch eine weitere Steuerkulisse mit diagonal verlaufender Führungsbahn und einer Feder oder durch eine Winkelhebel-Feder-Konstruktion. - nahe der unteren Rollenendlage nach rechts,
z. B. durch vorstehende, zweite Steuerkulisse mit diagonal verlaufender Führungsbahn und einer Feder.
- nahe der oberen Rollenendlage nach links,
- Die AF sollte durch eine Feder in die Nullstellung des Anstellwinkels gezogen werden (entgegen der Auftriebskraft).
Ach andere Anstellwinkel direkt am Flügel kann man damit vom Antrieb aus steuern.
Beim Streckenflug besteht der Aufschlag des Armflügels aus einer relativ schnellen Aufschlagbewegung, gefolgt von einer kurzen Wartezeit im Stillstand in der oberen Schlagendlage. Der Gewindespindelantrieb ist für diese Aufgabe gut geeignet.
3. Antrieb-Funktionsbeschreibung
Bei Anwendung eines Kugelgewindetriebs muss bei jedem Wechsel der Flügelschlagrichtung auch der Motor die Drehrichtung wechseln. Dies erscheint zunächst recht nachteilig. Wird der Drehrichtungswechsel aber weitgehend durch mechanische Kräfte von außen bewirkt, so halten sich die Motorverluste dabei in Grenzen. Der Vorteil dieser Antriebstechnik ist ein relativ hoher Wirkungsgrad im Bereich der Schlagmitte.
Auch bei den bisherigen EV-Mechaniken arbeitete der Antriebsmotor im Bereich der Schlagendlagen nicht sehr effektiv (Leerlauf).
3.1 Funktionsdiagramm
-
- Funktionsdiagramm
Beim EV8 erfolgt die Bewegungsumkehr der rotierenden Antriebs- und Flügelmassen hauptsächlich durch mechanische bzw. aerodynamische Kräfte.
- in der unteren Flügelendlage durch die Auftriebskräfte des Flügels und
- in der oberen Flügelendlage durch eine sogenannte
Endlagenfeder
.
Die während der Umsteuerung auftretenden elektromechanischen Motorkräfte sollen die Bewegungsumkehr nur geringfügig unterstützen.
3.2 Wechsel der Schlagrichtung
3.2.1 Bewegungsumkehr in der unteren Flügelendlage
-

- Flügelrohbau in Aufschlag-Verwindungsstellung
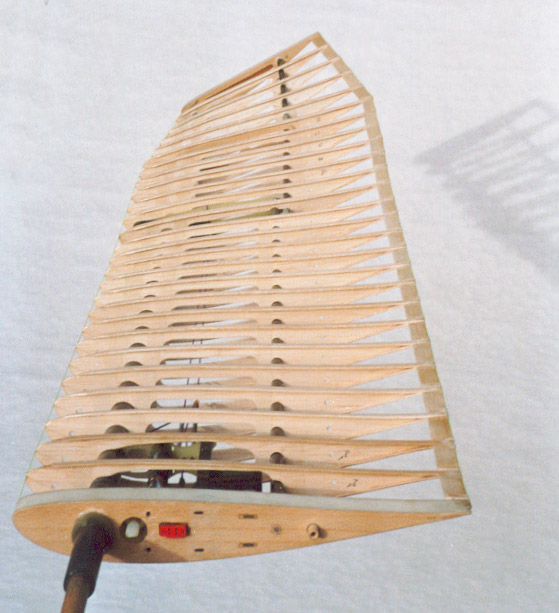
Das Schlagflügel-Holmgerüst ist wie beim EV6 und EV7 so konzipiert, dass es durch seine innere Vorspannung immer versucht die Aufschlag-Verwindungsstellung einzunehmen. Zur Veranschaulichung der inneren Vorspannung ist das Flügelgerippe in nebenstehendem Bild freitragend in Rückenlage aufgestellt. Diese Vorspannung ist für die Bewegungsumkehr in der unteren Schlagendlage wichtig. Die Bewegungsumkehr spielt sich etwa wie folgt ab: (Nr. wie Punkte im Funktionsdiagramm)
-
Die Motorumschaltung erfolgt, wenn die Flügel beim Abschlag die untere Vorendlage erreichen. Durch die Verzögerungszeit im Drehzahlsteller wirkt sie zunächst wie eine Abschaltung.
Der Auftrieb am Flügel ist gegen den noch laufenden Abschlag gerichtet. Die bewegten Massen werden dadurch immer langsamer. Auch die Auftriebskraft und die Flügelverwindung lassen nach.
-
Kommt der Abschlag in der unteren Endlage zum Stillstand, entspricht die Flügelverwindung theoretisch derjenigen im Gleitflug. Ebenso die Auftriebskraft. Sie beschleunigt nun den Flügel wieder nach oben.
Etwa zu gleichen Zeit beginnt auch der elektrische Hochlauf des Motors in die neue Drehrichtung. Noch arbeitet er aber weitgehend ohne Belastung. Über den Kugelgewindetrieb wird die Motorbeschleunigung hauptsächlich von den Flügelkräften bewirkt.
-
Mit zunehmender Aufschlaggeschwindigkeit lassen die Auftriebskräfte weiter nach. Der Flügel nimmt immer mehr die maximale Aufschlag-Verwindungsstellung ein. Er erreicht sie etwa in der unteren Vorendlage.
Der Motor hat dort die volle Drehzahl erreicht. Er übernimmt nun mit seiner elektromechanischen Kraft den Antrieb für den weiteren Flügelaufschlag und das Spannen der Kompensationsfeder.
Für den ganzen Vorgang ist der hohe Wirkungsgrad des Kugelgewindetriebs bei Umwandlung der linearen in die rotierende Bewegung von großer Bedeutung.
Die Bewegungsumkehrarbeit - auch die der rotierenden Antriebsteile - wird hauptsächlich von der Flügelauftriebskraft verrichtet.
Zu den rotierenden Teilen des Antriebs zählen Gewindespindel, Zahnriemenräder und Motor (Rotor). Der Drehimpuls des Motors ist wegen seiner hohen Drehzahl beträchtlich.
Man kann in der unteren Flügelendlage die Bewegungsumkehr des Flügels wie beim Triebstockantrieb auch durch eine Endlagenfeder unterstützen. Für die Schuberzeugung ist das ohne Bedeutung, für den Auftrieb aber eher nachteilig.
3.2.2 Bewegungsumkehr in der oberen Flügelendlage
-

- Endlagen Stahldruckfeder

In diesem Bereich übernimmt anstelle des Flügelauftriebs
eine sogenannte Endlagenfeder
aus Stahl die positive
und negative Beschleunigung der Massen. Der Bewegungsablauf funktioniert
sonst analog wie vorstehend.
Im Bereich der oberen Flügelendlage arbeitet der schon beim Aufschlag dort anwachsene Auftrieb ständig gegen die Bewegungsumkehr. Die Endlagenfeder muss daher auch diese Kraft überwinden. Entsprechend kräftig ist ihre Dimensionierung (Federkraft max. 976 N).
Bei gutem Rückführungswirkungsgrad der Flügelmassen- Bewegungsenergie über den Kugelgewindetrieb und den Motorsteller in den Antriebsakku kann diese Endlagenfeder später auch schwächer ausgelegt werden.
Der Energiefluss der schwingenden Schlagflügelmasse ist im Handbuch, Abschnitt 5.3 beschrieben.
4 Testvorrichtung
-


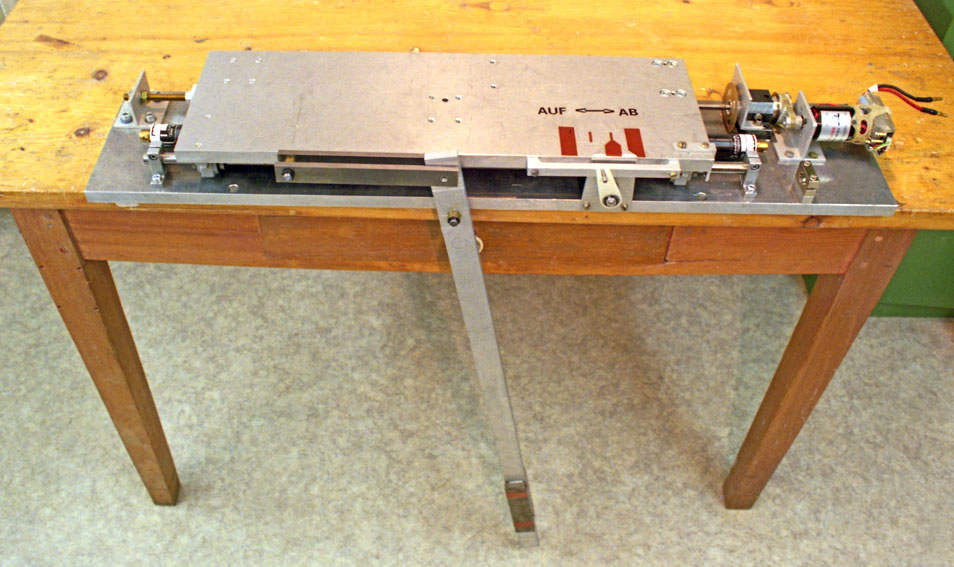
- Testvorrichtung für den
EV8-Schlagflügelantrieb
{kind=link}
Zur Erprobung der Antriebsfunktionen beim Zusammenwirken von Elektronik und Mechanik wurde eine Testvorrichtung gebaut.
Das nach unten hängende Pendel hat das gleiche Trägheitsmoment wie die beiden Schlagflügelhälften. Die aerodynamischen Kräfte von Auf- und Abschlag werden durch einstellbare Dämpfungszylinder grob nachgebildet.
Einige Fragen bleiben aber bis zur praktischen Kraftflug-Erprobung noch offen.
5. Weiterführende Links
- Datenblatt für den
Ball Reverser Actuator
der Firma Norco Inc. (USA): http://www.motiontech.com.au/assets/pdf/Flennor Norco Ball Reverser Actuator 230712.pdf (0.2MB) - Leichter, nachgiebiger Hochleistungsantrieb mit hohem Wirkungsrad für
die elastische Bewegung eines Roboterarmes.
A New Prismatic Series Elastic Actuator with Compact Size and High Performance
by Nicholas Paine and Luis Sentis from The University of Texas at Austin, USA, 2012:
Video: https://www.youtube.com/watch?v=KaQ6lx3ifPU
Journal Publication:
http://www.me.utexas.edu/~lsentis/files/Prismatic-SEA-paine.pdf (3,8MB)