
Ornithoptermodell EV8
Inhalt:


- Erster Gleitflug
- Spannweite
- Gewicht
- Flügelfläche
- Flächenbelastung
- Flügelstreckung
- Armflügel-Profil
- Profil an Flügelspitze
- Schlagwinkel
- Schlagperiode
- Neigung Schlagebene
- 2000
- 2,8 m
- 3,6 kg
- 0,61 qm
- 5,9 kg/qm
- 11,7
- S1020
- E203
- 60 Grad
- 0,66 s
- 6 Grad
1. Rumpherstellung

Anfertigung der Rumpf-Positivform
Für einen präzisen Mechanik- und Flügelanschluss ist
von Anfang an Lage und Richtung der Hauptspanten und Flügelschlagachsen
vorzugeben.
An das Schulterstück werden rechts und links noch die gedrechselten Profilspindelhälften für den Flügelübergang angepasst.
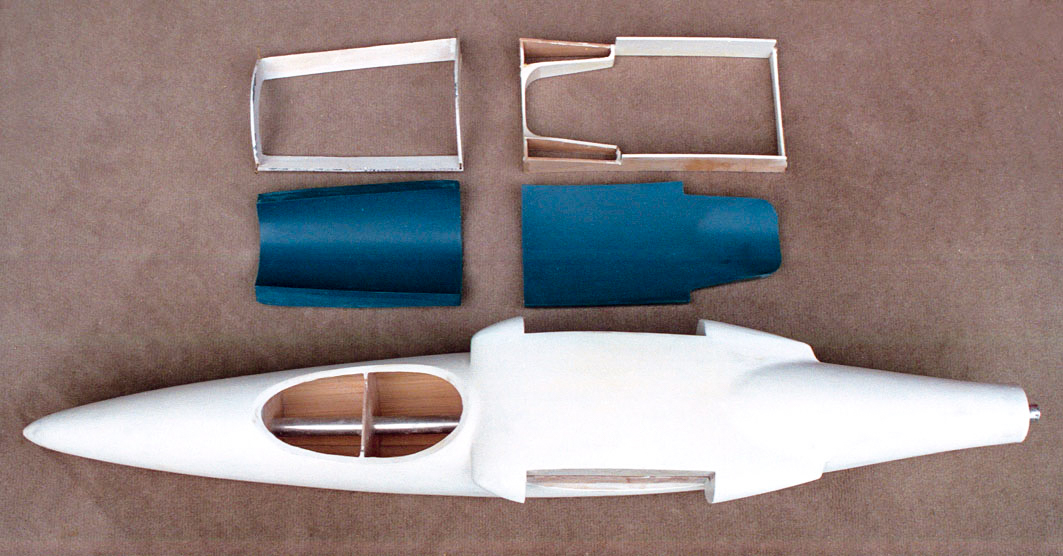
Fertige Rumpf-Positivform
mit den Negativformen der Rumpfabdeckungen.
Als Leitwerksträger wird später hinten ein konisches
Rohr in den fertigen Rumpf eingesetzt.
Rumpf-Negativform
Die Negativform und der Rumpf selbst werden in der üblichen GFK-Bauweise
hergestellt.


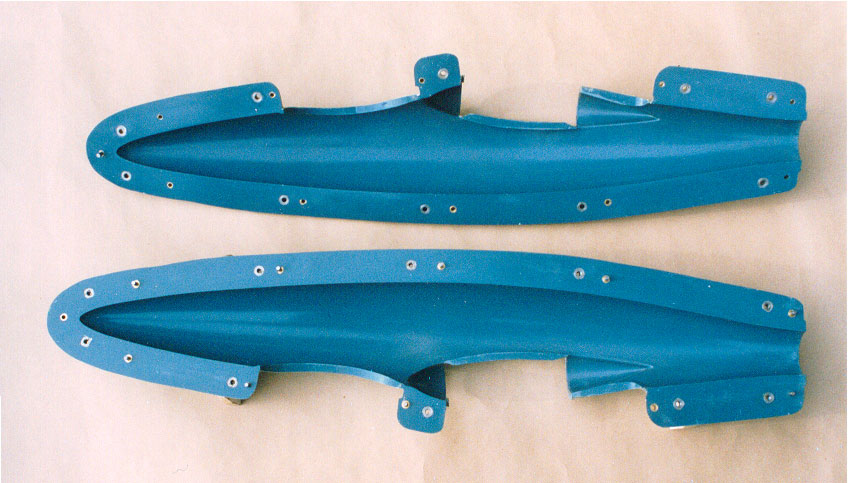
Rumpfverstärkung
Ohne Flügelanschlusswalzen ist in der Rumpf-Seitenansicht der tiefe
Einschnitt in die Rumpfkontur gut zu erkennen.
Zur Verstärkung in diesem Bereich wird zusammen mit den Hauptspanten
rechts und links je ein kräftiges CFK-Rohr in den Rumpf eingesetzt.
Diese Rohre laufen vorn und hinten sehr schlank an der Rumpfwand
aus. Der Rumpf wird dadurch sehr verwindungssteif.
Das Mittelteil ist hier fertig zur Aufnahme des Chassis mit der
Antriebsmechanik.
Fertiger Rumpf
- Länge
- max. Durchmesser
- Gewicht ohne bewegliche Einbauten
- 1,47 m
- 125 mm
- 600 g
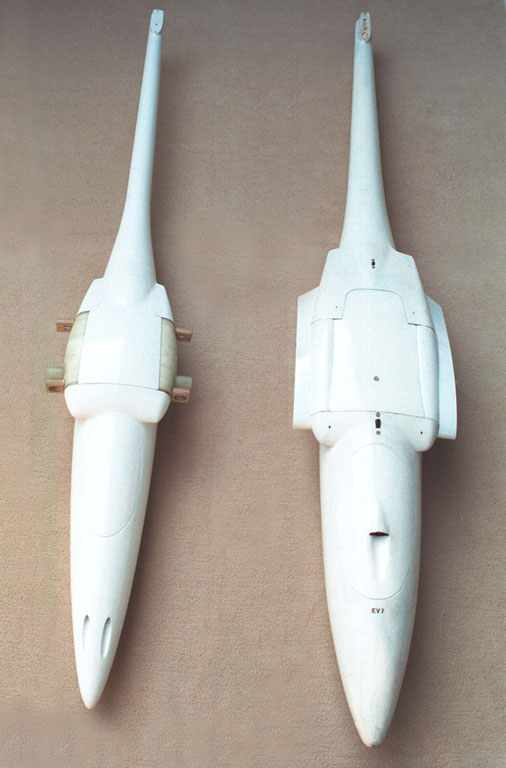
Größenvergleich
Wegen seiner kleineren Antriebsmechanik konnte der EV8
mit relativ schlankerem Rumpf gebaut werden. Dies macht sich beim
Gesamtgewicht und der Handhabung vorteilhaft bemerkbar.

Rumpf komplett
Die Rumpfherstellung war relativ aufwändig.
1.1 Flügelanschlusswalzen
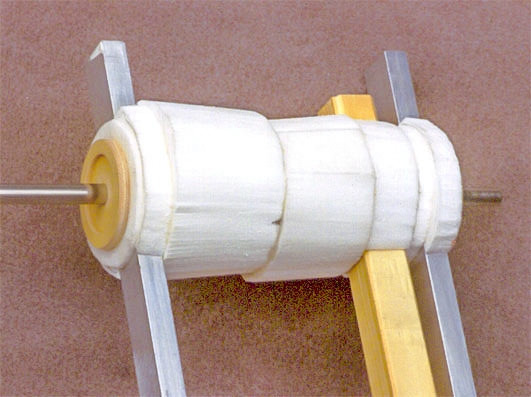
Die Herstellung beginnt mit den Endscheiben aus Sperrholz und der Schichtung der Hartschaum-Abschnitte entsprechend den späteren Aussparungen. Zur deren genauer Ausrichtung werden Profilleisten eingesetzt.
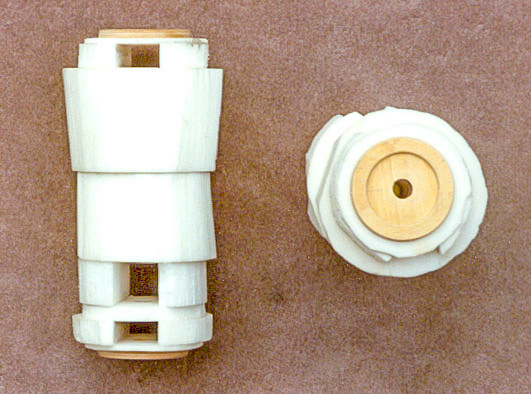
Fertige Hartschaum-Rohlinge

Bearbeitete Hartschaum-Walzen

Fertige Flügelanschlusswalzen
Der Hartschaum ist mit einer ca. 0,5 mm dicken Schicht aus GFK überzogen.
Die Ränder der Aussparungsöffnungen werden zusätzlich
etwas verstärkt. Das Fertiggewicht einer Walze mit den dargestellten Einbauten beträgt
etwa 100 g.
1.2 Rumpf-Flügel-Übergang
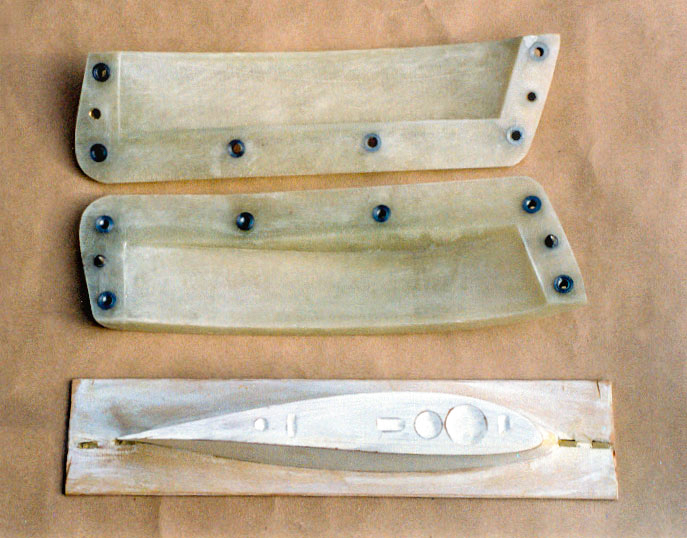
Verkleidung des Flügelübergangs
Auch für den Übergang vom symmetrischen Profil der Flügelanschlusswalze
zum gewölbten Flügelprofil ist ein Formenbau erforderlich.

Rumpf-Flügel-Übergang
ohne strömungsgünstige Verkleidung

Durch die Neigung der Schlagebene um 6 Grad - von oben-hinten nach unten-vorn - ergibt sich am Rumpf-Flügel-Übergang eine durchgängig gerade Endleiste (siehe Handbuch, Abschnitt 8.8).
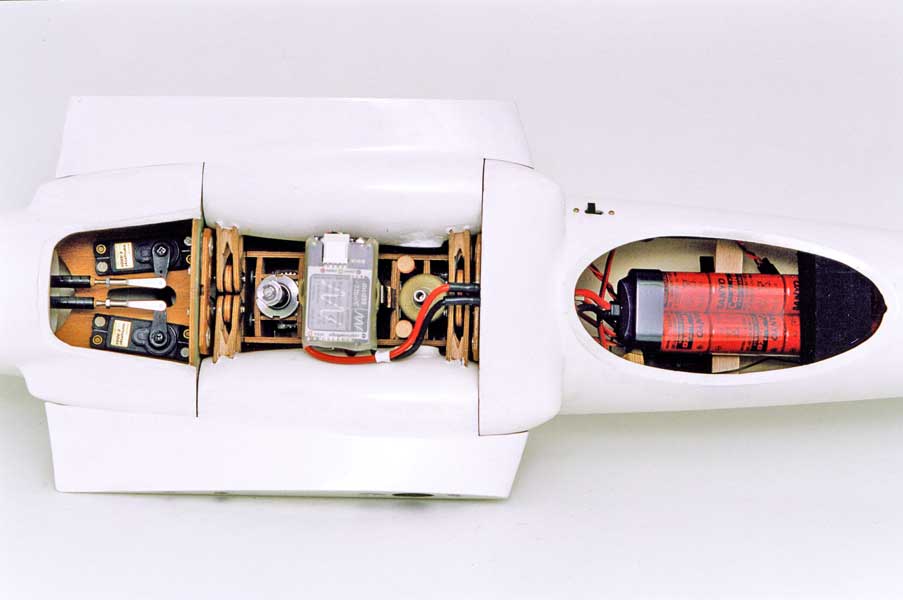
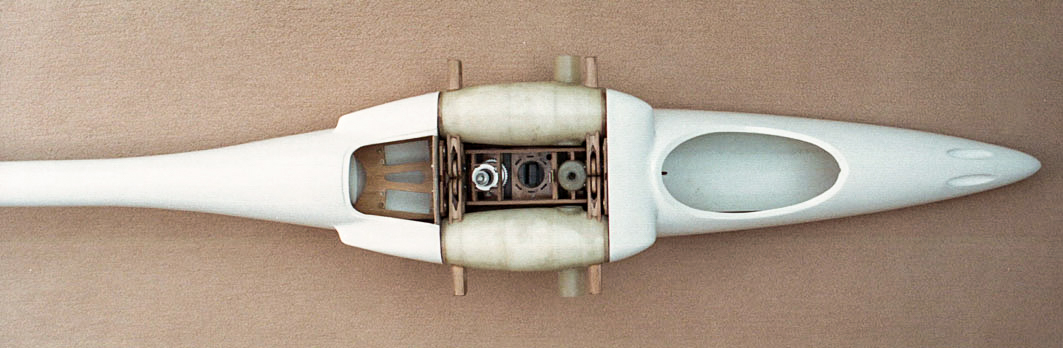
Ein Blick in die Rumpföffnungen
Durch die Konzentration der Mechanik zwischen den Flügeln
ist im vorderen Rumpfteil relativ viel Platz. Die elektronische
Ausrüstung ist hier aber noch nicht komplett.
2. Regelung der Fluggeschwindigkeit
Ein Flugmodell - ganz besonders ein Ornithopter im Kraftflug - fliegt nur in einem relativ engen Geschwindigkeitsbereich optimal. Im Gleitflug arbeitet normalerweise das Höhenleitwerk über die Einstellwinkeldifferenz (EWD) als automatischer Geschwindigkeitsregler. Durch Fernsteuerbefehle und im Kraftflug kommt es aber in der Praxis trotzdem zu erheblichen Geschwindigkeits-Schwankungen (siehe Flugstabilität der Ornithopter beim EV7).
Beim EV8 sollte ein elektrischer Regler die Einhaltung der optimalen Kraftfluggeschwindigkeit gewährleisten. Damit wird insbesondere beim Steigen im Kraftflug ein Strömungsabriss wegen zu geringer Fluggeschwindigkeit verhindert. Mit einem Geschwindigkeitsregler wird die Neigung der Flugbahn dann nur noch vom Schub bzw. von der Schlaggeschwindigkeit beeinflusst. Mehr oder weniger Schub führen zu mehr oder weniger Steigen. Eine Fernsteuerung des Höhenruders ist dann im Kraftflug nicht mehr erforderlich.

Regler
Es kommt ein Drehzahlregler für Hubschrauber mit Verbrennungsmotor
zum Einsatz. Seine Regeleigenschaften haben sich auch in dem hier
gestalteten Regelkreis als gut brauchbar gezeigt.

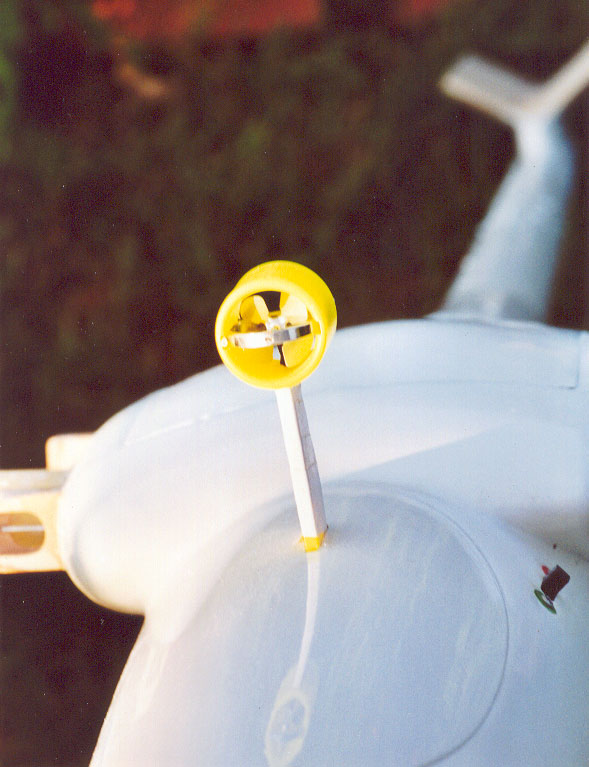
Sensor
Als Fahrtmesser arbeitet der Flügelradsensor eines Drachenflieger-Geschwindigkeitsmessers.
Er ist für drahtlose Drehzahlübermittlung konzipiert (Typ
Skywatch, Swiss made). Bei ihm rotiert mit dem Flügelrad ein
kleiner Magnet. Die Drehzahl des Magneten wird hier mit dem Sensor des Heli-Reglers
abgetastet, der sonst die Rotorblatt-Drehzahl erfasst.
Die gewünschte Drehzahl bzw. Soll-Fluggeschwindigkeit lässt sich am Regler per Fernsteuerung vorgegeben und sein Einfluss ein- und ausschalten. Für Tests wird der Flügelradsensor mit Hilfe eines Magneten, der am Ende einer Elektromotorwelle befestigt ist, auf die entsprechende Drehzahl gebracht.

Phygoide
Die fast bei jedem Gleitflug vorkommende, langsame Schwingung der Fluggeschwindigkeit
(zu Phygoide
siehe weiterführender Link 1) kann
mit der elektrischen Regelung vermieden werden. Das Modell flog seinen Gleitwinkel
so konstant wie auf Schienen geführt.
Auch missglückte Handstarts mit anfangs ungünstigem Gleitwinkel
sind kein Problem mehr. Das Modell geht direkt auf den durch die Soll-Geschwindigkeit
vorgegebenen Gleitwinkel über. Landen sollte man aber doch besser mit
abgeschaltetem Regler.
2.1 Becker-Ruder


Zur Verbesserung der Höhenruderwirkung wurde beim EV8 eine Anlenkung nach dem Prinzip eines Becker-Ruders angewandt. So etwas kommt sonst insbesondere bei Schiffen zum Einsatz. Es erhöht deren Manövrierfähigkeit.
Beim Becker-Ruder werden Steuerfläche und Klappenausschlag mit nur einem Hebel synchron bewegt. Das Höhenruder verändert dabei Anstellwinkel und Wölbung gleichsinnig. Auf diese Weise wird die Ruderwirkung grösser als mit nur einer der beiden Veränderungen.
Bei eingeschalteter Fluggeschwindigkeitsregelung genügen meist kleine Ruderausschläge. Der Vorzug des Becker-Ruders kommt daher hauptsächlich bei abgeschalteter Regelung zur Geltung.

Mechanischer Mixer für das V-Leitwerk
Statt den Gas-Servo des Heli-Motors steuert der Regler hier den
Höhenruder-Servo an.
Die beim EV8
schon vorhandene V-Leitwerk-Anlenkung musste dazu mit einem
mechanischen Mixer ausgestattet werden. Ein T-Leitwerk
wäre besser gewesen.
3. Gelenkschlagflügel

Im Zusammenhang mit den EV-Modellen
wurde eine Reihe von Schlagflügelkonstruktionen entwickelt. Aus ihnen ist
der aeroelastisch gesteuerte Gelenkschlagflügel
des EV8 hervor gegangen.
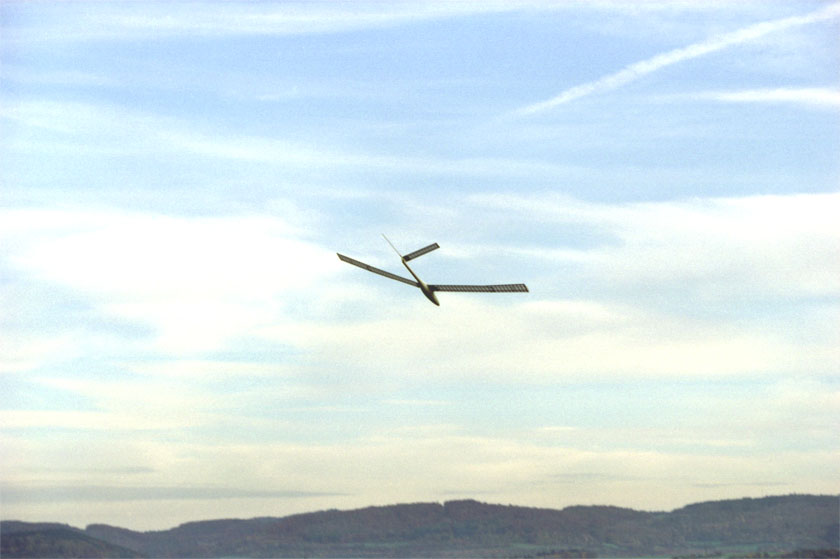
Erste Gleitflugversuche
verliefen zufriedenstellend. Auch Hochstarts
wurden durchgeführt.
Die Gleitflugversuche mit dem EV8 wurden 2003 erfolgreich abgeschlossen. Beim ersten Kraftflugversuch kam es dann aber wegen eines Bedienungsfehlers zu keinem Flügelschlag - dafür aber zu einer missglückten Landung. Ein Flügelholm ging dabei zu Bruch.
4. Weiterführende Links
- Simulation der Phygoide von Peter Rother:
http://www.aerodesign.de/peter/1998/phygosim.htm