
Andere Schlagflügelkonstruktionen
Bei der Konstruktion von Ornithoptermodellen gibt es neben der intensiven Beschäftigung mit der Schlagflügeltheorie insbesondere zwei Aufgabenschwerpunkte, die Entwicklung der Antriebstechnik und die Entwicklung der Schlagflügel. Im Allgemeinen gilt das große Interesse der Antriebstechnik. Das Hauptproblem bei der Entwicklung derartiger Fluggeräte sind aber die Schlagflügel. Auf diesem Konstruktionsgebiet klaffen Wunsch und Wirklichkeit noch sehr weit auseinander.
Nachstehend wird der Versuch unternommen, einen groben Überblick über die technischen Merkmale bekannter Schlagflügelkonstruktionen zu geben. Diese Sammlung erhebt aber keinen Anspruch auf Vollständigkeit.
Inhalt:
- 1. Der Vogelflügel, das Ideal
- 2. Membranschlagflügel
- 2.1 Das Segel als Vorlage
- 2.2 Einfache Membranschlagflügel
- 2.3 Einfacher Membranschlagflügel mit
Segellatten - 2.4 Aktive Verwindung durch Holmdrehung
- 2.5 Aeroelastische Verwindung durch Holmtorsion
- 2.6 Nurflügel-Ornithopter
- 2.7 Tandemanordnung
- 2.8 Triebflügel
- 2.9 Schwingender, gestreckter Flügel
- 2.10 Rotationsflügel
- 2.11 Mit nicht-verwindbarem Armflügelabschnitt
- 3. Profilschlagflügel
- 4. Hinweise
- 5. Weiterführende Links
zu anderen Schlagflügelkonstruktionen
1. Der Vogelflügel, das Ideal
Das große Vorbild für technische Schlagflügel ist natürlich der lebendige Vogelflügel. Seine hohe Effektivität durch seine vielfältigen Möglichkeiten sich gezielt zu bewegen und die Form zu ändern ist im Flugmodellbau sicher noch lange unerreichbar. Das gilt auch für seine Gewichtsverteilung und seine Sensorik.

In dieser Zeichnung von K. Herzog ist die anatomische
Unterteilung des Vogelflügels in einen Arm- und einen Handabschnitt dargestellt.
Sie ist auch bei der Beschreibung technischer Schlagflügel vorteilhaft anzuwenden.
Die Längenanteile dieser Flügelabschnitte sind je nach Vogelart recht unterschiedlich.
2. Membranschlagflügel
Anwendungsgebiet
Membranschlagflügel wechseln insbesondere im Handflügelbereich je nach Schlagrichtung die Profilwölbungsrichtung. Dadurch können sie viel Schub erzeugen und großartige Steigflüge erzielen (Fliegen mit dem Schub). Für den Gleitflug und das Fliegen mit dem Auftrieb sind sie jedoch bisher weniger geeignet.
2.1 Das Segel als Vorlage
Ein Segel hat - wenn auch unter anderen Bedingungen - etwa die gleiche Aufgabe wie ein Schlagflügel. Es soll bei wechselnden Anströmungsrichtungen möglichst viel Schub erzeugen.
Durch Materialauswahl, Zuschnitt, Stückelung, Trimmen des Segels und Einstellen des Riggs kann man die Segeleigenschaften in weiten Grenzen variieren. Latten geben dem Segel mehr Stabilität und ein optimales Profil. Über die Herstellung des Segels und seine praktische Anwendung findet man viele Beschreibungen mit ausgefeilten Hinweisen.
Es wurden zwar schon eine ganze Menge Membran-Schlagflügelsysteme entwickelt, es gibt aber kaum detaillierte Informationen darüber.
2.2 Einfache Membranschlagflügel
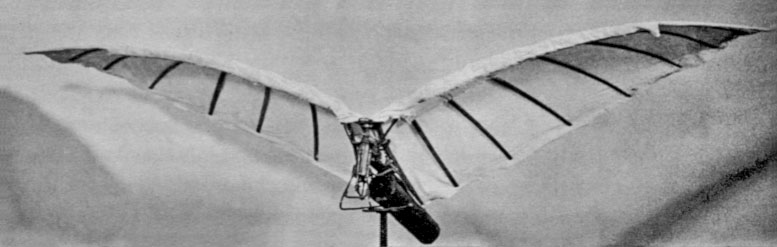
Die Triebschwinge
von
![]() Alexander Lippisch (ca. 1937) war offensichtlich
für die Schuberzeugung optimiert. Dazu wurde die Flügeltiefe im äußeren
Flügelbereich sehr groß gestaltet. Zur gleichzeitigen Auftriebserzeugung
war diese Triebschwinge aber nicht gedacht. Sie ist lediglich ein Propeller für
wechselnde Drehrichtung.
Alexander Lippisch (ca. 1937) war offensichtlich
für die Schuberzeugung optimiert. Dazu wurde die Flügeltiefe im äußeren
Flügelbereich sehr groß gestaltet. Zur gleichzeitigen Auftriebserzeugung
war diese Triebschwinge aber nicht gedacht. Sie ist lediglich ein Propeller für
wechselnde Drehrichtung.
Tim
war das erste in Serie gefertigte, Gummimotor-betriebene
Schlagflügelmodell mit einfachen Membranschlagflügeln, erfunden von Albertini
Prosper und de Ruymbeke Gérard (Frankreich 1969).

Die Membranbedruckung des Tim auf nebenstehendem Bild wurde von K.
Herzog entworfen.
Unter der Bezeichnung Tim Bird
ist der Vogel auch heute
noch im Handel erhältlich.
2.3 Einfacher Membranschlagflügel mit Segellatten
Hier ein berühmter Membranschlagflügel, ausgestattet
mit kleinen Segellatten
zur Stabilisierung der Membrane, entwickelt von A.
Pénaud (Frankreich 1872).
Mehr Informationen - in Englisch - siehe weiterführender Link 1
2.4 Aktive Verwindung durch Holmdrehung
Membranschlagflügel von Erich v. Holst / Karl Herzog (1963) mit vom Antrieb gesteuerter Flügelverwindung im Armflügelbereich durch Holmdrehung. Dazu ist nur die Rippe am Ende des Armflügels (Nr. 9) fest mit dem Holm verbunden. Dieser ist an einen Kurbelantrieb angeschlossen, der sowohl die Schlag- als auch die Drehbewegung des Holmes bewirkt.
Die Verwindung im Handflügelbereich erfolgt weitgehend passiv. Außerdem ist hier ein Übergang von Quer- auf Längslattung zu sehen. Er ermöglicht, trotz wechselnder Profilwölbungsrichtung während einer Schlagperiode, einen relativ gezielten Anstieg der Verwindung zur Flügelspitze hin.
Auch die Vogelmodelle von K. Herzog (1963) arbeiteten nach diesem Schema.
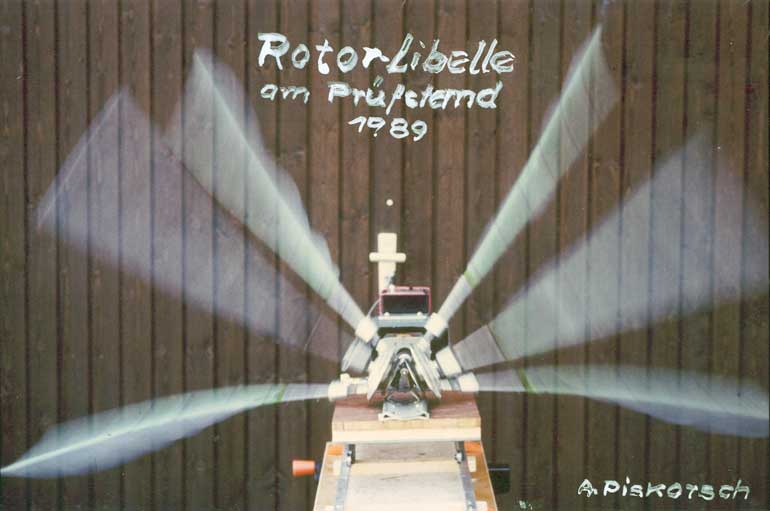
2.5 Aeroelastische Verwindung durch Holmtorsion
Das Schlagflügelmodell des Tschechen Cenek Chalupsky (1934) flog auch ohne Leitwerk stabil. Die damit erzielte Steigleistung gilt heute noch als sehr beachtlich.
- Gewicht
- Spannweite
- Holm
- Bespannung
- Steighöhe
- 3,1 kg
- 2 m
- natürliches Rohrmaterial
- Leinen
- 15-20 m
Jeder Schlagflügel dieses Ornithopters hat zwei Holme. Der gerade, biegesteife Holm (H1) überträgt die Kräfte der Schlagbewegung. Der gebogene, torsionselastische Holm (h3) bestimmt die Größe der Flügelverwindung.
Beide Holme kreuzen sich etwa in der Mitte der Halbspannweite. An der Kreuzungsstelle sind sie beweglich miteinander verbunden. Damit sich der torsionselastische Holm h3 an der Flügelspitze nicht zu sehr nach hinten biegt, ist zwischen den Holmenden offensichtlich eine Schnur oder ein Gummifaden gespannt.
Beim Abschlag des Flügels werden die Auftriebskräfte größer. Der Holm h3 und der Flügel verwinden sich. Die Größe der Verwindung richtet sich nach der Größe der Auftriebskraft und der Holmsteifigkeit. Sie erfolgt also aeroelastisch.
Zusätzlich zur Verwindung biegt sich beim Abschlag die Spitze vom Holm h3 nach oben. Als Reaktion darauf biegt er sich auf der anderen Seite der Holmkreuzung - also im Armflügelbereich - nach unten durch. Dadurch wird dort die Profilwölbung ein wenig größer. Auf diese Weise erfolgt eine Anpassung an die Anforderungen einer wirkungsvollen Schlagbewegung.
Siehe auch ![]() Piskorsch Adolf (1975):
Piskorsch Adolf (1975): Pressluft-Schwingenflugmodell
Chalupsky
und das Video von weiterführendem Link 2.
2.6 Nurflügel-Ornithopter
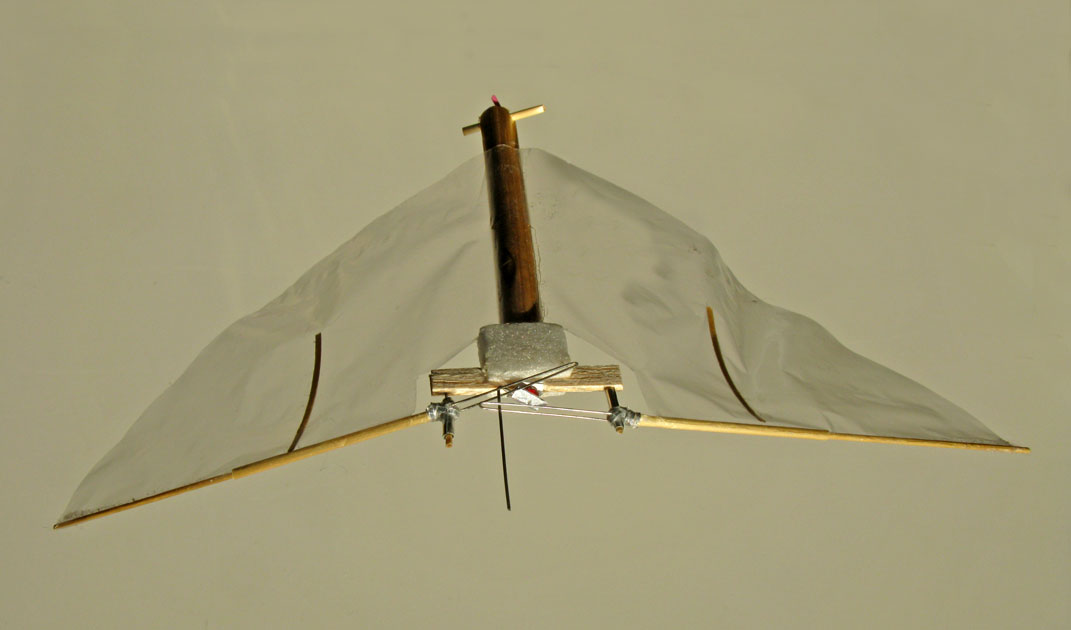
Ornithopter ohne Leitwerk, entwickelt von Jean-Louis Solignac (Frankreich 2000).
Das Schlagflügelmodell Kleiner Vogel
hat eine sehr einfache und leichte Antriebsmechanik
und wird von einem Gummimotor angetrieben. Bei einer Spannweite von 15 cm hat
es nur ein Gewicht von 0,6 Gramm. Die mit dem Modell erzielten Flugleistungen sind
erstaunlich gut. Zur Bauweise des Schlagflügelmodells, siehe auch weiterführender
Link 3
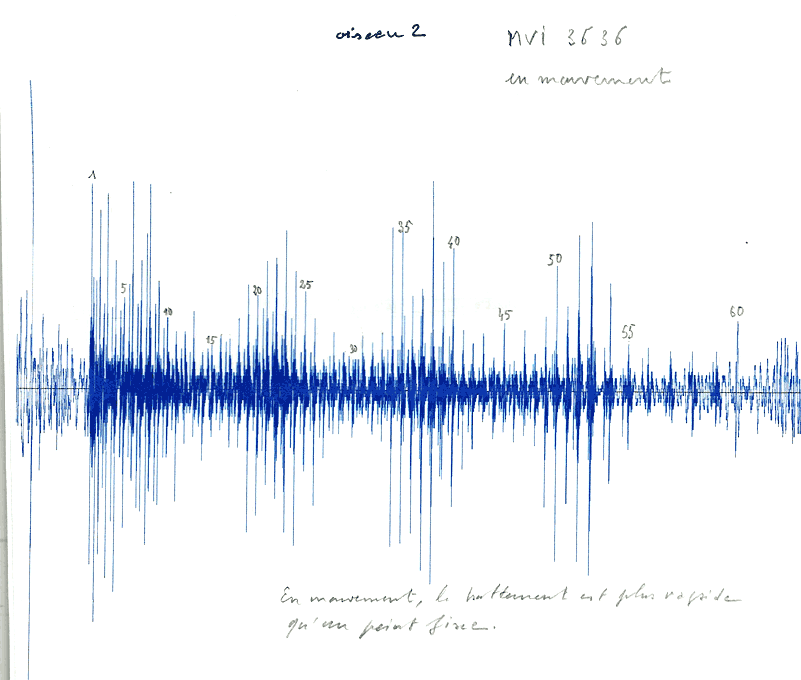
Akustische Aufnahme der Schlagflügelgeräusche von Kleiner
Vogel
. Damit kann man die Schlagfrequenz bestimmen.
Das Besondere an diesen Schlagflügeln ist das durch Segellatten geformte, nach unten gewölbte Flügelprofil. Dadurch fliegt das Modell auch ohne Leitwerk in einer stabilen Fluglage. Das lässt sich theoretisch mit der Druckpunktwanderung bei dünnen Profilen erklären und durch nebenstehenden Versuch mit einem Papierflieger testen. Der Querschnitt dieses Papierfliegers entspricht einem nach unten gewölbten Profil.

Behält man den Schwerpunktabstand d
von der Flügelnase wie beim
Papierflieger bei, so fliegt auch ein leichtes Balsa - Nurflügelmodell ausgezeichnet.
2.7 Tandemanordnung
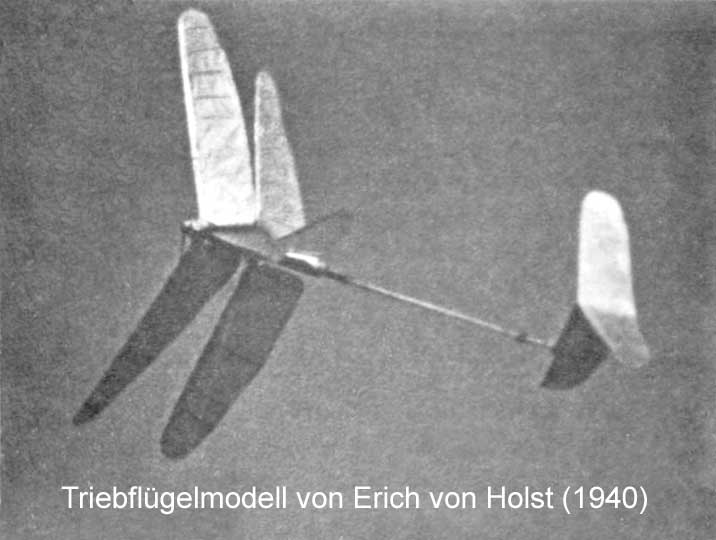
Ornithopter mit einem einer Libelle nachempfundenen Schlagflügelpaar, entwickelt von E. v. Holst (1940) / Karl Herzog (1963).
Zur Vereinfachung der Mechanik sind die direkt gegenüberliegenden Flügelhälften jeweils zu einer starren Einheit verbunden. Auf diese Weise wird der Modelldruckpunkt zwischen den beiden Flügeleinheiten fixiert.
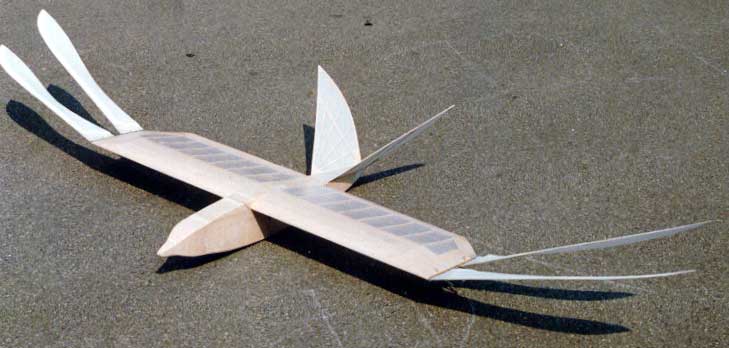
Durch eine derartige Tandemanordnung von gegenläufig schlagenden Flügeln soll insbesondere die senkrechte Rumpfpendelbewegung vermieden werden. Das hat aber den Nachteil, dass sich der hintere Schlagflügel in der verwirbelten Nachlaufströmung des vorderen befindet. Nur bei sehr kleinen Flügeln bzw. bei sehr kleinen Rezahlen ist das eventuell von Vorteil (Flugmodell von Horst Händler, 1988).
2.8 Triebflügel
Durch Technisierung des Flugprinzips einer Libelle hat ![]() Erich von Holst (1948) seinen
Erich von Holst (1948) seinen Triebflügel
mit zwei gegenläufig rotierenden Dreiblattflügeln entwickelt (siehe
Video mit dem Flug vom Triebflügel).
Der Schlagwinkel einer Schlagrichtung beträgt beim Triebflügel 180° bzw. der einer ganzen Schlagperiode 360°. Drei statt zwei Flügelblätter je Rotor ermöglichen eine konstante, tragende Kraft.
Anders als bei einem Propeller, kann am Triebflügel eine erhebliche Auftriebskraft senkrecht zur Flugrichtung erzeugt werden. Dazu muss man nur den Triebflügel-Fortschrittsgrad groß machen - etwa so wie bei einem normalen Schlagflügel - und mit einem kleinen positiven Anstellwinkel der Triebflügelachse fliegen (Der Fortschrittsgrad ist das Verhältnis von Fluggeschwindigkeit zur Umfangsgeschwindigkeit an der Flügelspitze.).
Dies ist ein schönes Beispiel für die innovative Umsetzung des biologischen
Schlagflügelprinzips in die Technik. Das Fachgebiet Bionik
gab es damals
aber noch nicht.
Das Triebflügelmodell ENTOID
(2007) von Velko T. Velkov hat zwei nebeneinander
liegende Rotoren. Sie werden von einem Gummimotor angetrieben (siehe weiterführender
Link 4).
2.9 Schwingender, gestreckter Flügel
Schub entsteht auch durch Auf- und Abbewegung eines gestreckten Flügels im Flug. Dazu muss aber der Auftrieb bei der Aufwärtsbewegung kleiner sein als bei der Abwärtsbewegung. Je größer der Unterschied, umso besser für den Schub (siehe Flugprinzip/Vektordiagramm). Außerdem ist im Regelfalle eine ständige Anpassung des Einstellwinkels erforderlich.
Hier eine verblüffend einfache Erzeugung einer entsprechenden Flügelbewegung. Sie erfolgt mittels einer exzentrisch gelagerten, rotierenden Masse, bestehend aus der Antriebsfeder und dem Getriebe. Der Flügel ist in diesem Falle aeroelastisch verwindbar. Die Idee dazu stammt von W. B. Mituritscha (vermutlich aus Russland, 1953).
Leider erfolgt auf diese Weise auch eine Vor- und Rückbewegung des Flügels. Diese lässt sich jedoch durch eine zweite, gegenläufig rotierenden Masse vermeiden.
Es gibt diverse Vorschläge, eine oszillierende Flügelbewegung von einem Piloten zu erzeugen, der in einem Hängegleiter oder einem anderen ultraleichten Fluggerät fliegt - z. B. durch schnelle Liegestützen oder Kniebeugen.
Ganz andere Modellversuche mit oszillierenden Flügeln zeigt Karl-Heinz
Helling mit seinem Doppel-Schlagflügelflugzeug
(2008), siehe weiterführender
Link 5.

Im Prinzip auf die gleiche Weise erzeugt der antriebslose Zeppelin Phönix
durch seine eignen Auf und Abbewegungen mit den Flügeln Vortrieb. Britische
Ingenieure haben ihn seit 2016 entwickelt (siehe weiterführender
Link 6). Auch Heißluftballons können mit solchen Flügeln
beim Auf und Abstieg etwas manövrierfähig werden.
2.10 Rotationsflügel
Um die Beschleunigungskräfte in den Schlagendlagen
zu vermeiden hat man auch Schlagflügel
gebaut, die auf einem Kegelmantel
rotieren, dessen Kegelspitze an der Flügelwurzel liegt.
Die Rückwärtsbewegung der Flügelspitze im Bereich der unteren Endlage ist für den Auftrieb sicherlich nachteilig.
{kind=link}

.. das Flugmodell von Horst Händler (1989).
Bei seinem Modell sind die beiden Enden der Antriebswelle abgewinkelt. Die Flügel
sind frei drehbar darauf gesteckt. Der Einstellwinkel wird durch einen an den Flügeln
nach oben ragenden Hebel geführt.
2.11 Mit nicht verwindbarem Armflügelabschnitt

Membranschlagflügel von P. H. Spencer mit mechanisch nicht verwindbarem Armflügelbereich und passiver Verwindung des Handflügels. Aus aerodynamischer Sicht erfolgt aber im Bereich des Armflügels, durch die hinten anschließende Handflügelmembrane, dennoch eine Art Verwindung. Beim Abschlag verkleinert sie, und beim Aufschlag vergrößert sie den Auftrieb am Armflügel. Eine Abwinklung des Handflügels nach unten hilft dabei. Das unterstützt zwar die Auftriebsverlagerung, erfordert aber beim Aufschlag negativen Auftrieb im ganzen Handflügelbereich.
Der Armflügel ist dreieckförmig und hat an der Flügelwurzel eine
große Flügeltiefe. Arm- und Handflügelmembrane überlappen sich
in Spannweitenrichtung. Der Handflügelholm konnte offensichtlich im Handgelenk
eine kleine Schlagbewegung ausführen. Die Handflügeltiefe wurde später
vergrößert (siehe auch Konstruktion der Triebschwinge
von Alexander Lippisch).
Entwickelt wurde diese sinnreiche Schlagflügelkonstruktion
der Seagull
von Percival H. Spencer (USA 1958), siehe weiterführender
Link 7.

Heute ist dieses Schlagflügel - Konstruktionsprinzip, auch mit eingesetzten Segellatten, weit verbreitet.
3. Profilschlagflügel
Anwendungsgebiet
Profilierte bzw. beidseitig bespannte Schlagflügel können mit sehr hoher Effizienz arbeiten. Mit ihrer meist relativ niedrigen Schlagfrequenz und dem kleine Auftriebsbeiwert-Arbeitsbereich eines einfachen Profils lässt sich aber nicht viel Schub erzeugen. Zumindest dann nicht, wenn gleichzeitig der volle Auftrieb erzeugt werden muss (Fliegen mit dem Auftrieb). Profilschlagflügel eignen sich daher insbesondere für den Horizontalflug, den flachen Steigflug und natürlich auch für den Wechsel zum Gleitflug.
3.1 Mit künstlichen Federn

Um die Verwindung zu erleichtern, kann man die geschlossene Tragfläche auffächern. So etwas kommt bisher insbesondere bei großen, manntragenden Schlagfluggeräten zur Anwendung.
Nebenstehend der Schlagflügel mit gestaffelter Flügelspitze vom manntragenden
Schwan 1
, entwickelt von Walther Filter (1955, auf der Hannover Messe
1958). Der Anstellwinkelausschlag der als einzelne Tragflächen ausgebildeten
Federn
war steuerbar, siehe auch weiterführender
Link 8.
Selbst für die Schwenk- und Spreizbewegung der Federn
gibt es alte
Konstruktionsvorschläge. Beim EV7b
wurde dagegen nur mit einfachen Federausführungen experimentiert.
Ein weiteres Beispiel für künstliche Federn ist
der Ikarus
von Emiel Hartman (England 1959).
Ein neueres Experiment mit künstlichen Federn sieht man beim
Vogelmann
Georges Fraisé (Frankreich 2005), siehe weiterführender
Link 9.
3.2 Mit schräger Handflügelachse
Eine besondere Variante eines Schlagflügels kommt von K. Herzog (1963). Bei diesem Flügel steht die Verdrehungs- bzw. Verwindungsachse nicht senkrecht zur Schlagachse.
Der Armflügel sollte im Schultergelenk neben der Schlag- auch eine Drehbewegung ausführen. Durch Gummifäden zwischen Arm- und Handflügel wurde letzterer ein wenig nach unten gezogen (aeroelastischer Flügel).
Dies ist auch ein früher Vorschlag für einen Gelenkschlagflügel mit einer zusätzlichen Schlagbewegung des Handflügels.
Der Profilknick bzw. die Trennlinie zwischen Arm- und Handflügel verläuft etwa an der gleichen Stelle wie beim oben erwähnten Membranflügel von P. H. Spencer.
3.3 Verwindung durch Kippen der Flügelnase
Das Besondere an dem Verstellpropeller
von John Drake ist, dass zur Flügelverwindung
nicht die Flügelendfahne sondern die Flügelnase gedreht wird (England,
Flugversuche 1978).
3.4 Mit stufiger Verwindung

Eine angenäherte Flügelverwindung erhält man auch durch Verdrehung einzelner, relativ verwindungssteifer Flügelabschnitte. Das Modell EV4 (1979) war mit so einer Verdrehung einzelner Flügelabschnitte ausgestattet. Allerdings wurden in diesem Fall die Drehungen vom Flügelantrieb aktiv gesteuert.

Ein typischer Vertreter einer passiven, stufenweisen Verwindung ist der Step-Twister
mit seinen Schaumstoffflügeln (Depron) von Karel Pustka (2004). Der zwischen
den Flügelabschnitten sich bildende Spalt ist mit einer Membrane überspannt.
3.5 Verwindung durch Hilfsholm-Schlagbewegung
Hier wird die Flügelverwindung durch eine phasenverschobene Haupt- und Hilfsholm-Schlagbewegung erzeugt - entwickelt von Emile Räuber (Frankreich 1909).

Diese Technik wurde auch beim EV2 (1976) angewandt. Nebenstehend sind die Flügel mit ihren zwei getrennt angetriebenen Holmen zu sehen. Die Funktion ist ähnlich wie bei einem Libellenflügel. Auch bei ihm bestimmt die Phasenverschiebung der Schlagbewegungen von Haupt- und Hilfsholm die Größe der Flügelverwindung.

Außerdem arbeitet die Libelle offensichtlich mit einem weiteren, kräftigen Holm an der Flügelnase. Durch die phasenverschobene Schlagbewegung von drei Holmen lässt sich auch die Profilwölbung beeinflussen.
Die Abstützungen bzw. Anlenkungen der drei Holme am Körper sind hier deutlich als dunkle, teilweise sich kreuzende Strukturen auf dem Rücken der Libelle erkennbar, siehe weiterführender Link 10.
Nach meiner Erfahrung eignet sich das Verwindungsverfahren nur für kleine Spannweiten (bis etwa 1 Meter). Die Einhaltung bestimmter Verwindungen wird sonst durch Elastizität, Toleranzen und Reibung der Bauteile zu unbestimmt.
3.6 Servo-gesteuerte Flügelverwindung
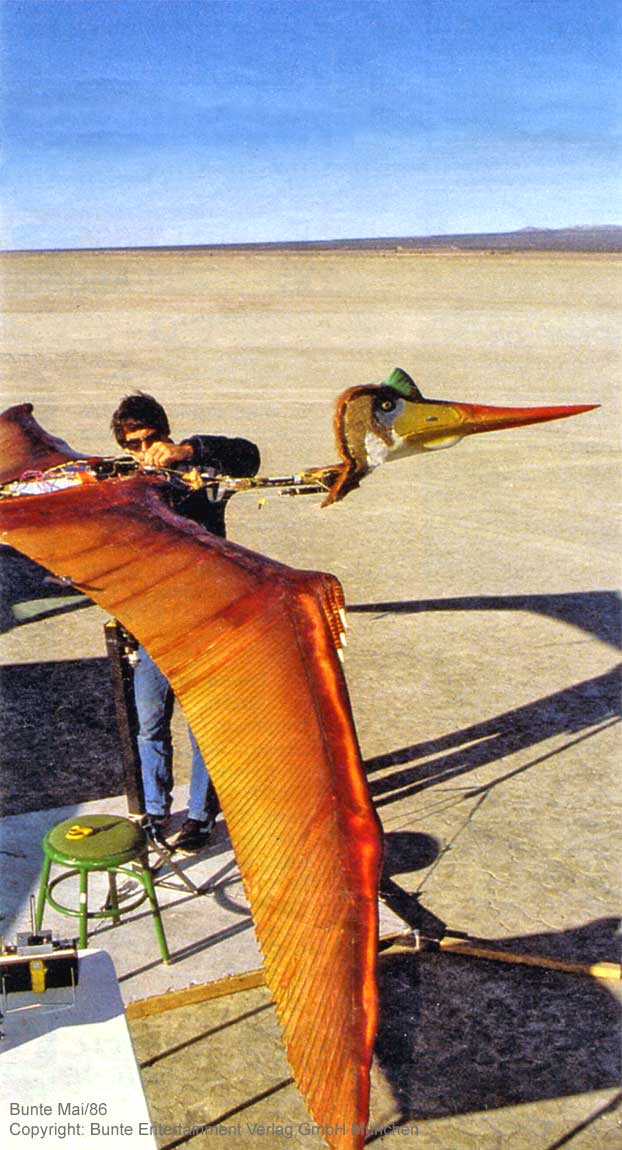
Das ist ein flugfähiger und naturgetreuer Nachbau eines Flugsauriers - eines Quetzalcoatlus Northropi (QN) - in halber natürlicher Größe. Die Aerodynamik dieses Ornithopters sollte dem Original möglichst weitgehend gleichen. Die Idee dazu stammte von dem kreativen Genie Dr. Paul MacCready (USA 1985).
Die Flügelverwindung wurde über Servos gesteuert und die Fluglage durch Vor- und Rückbewegungen der Flügelspitzen und durch Nickbewegungen des Kopfes stabilisiert.
Details - auch zum Antriebsprinzip - siehe Zeitungsartikel über das Projekt
von ![]() Paul MacCready und weitere Infos mit
weiterführendem Link 11.
Paul MacCready und weitere Infos mit
weiterführendem Link 11.

Auch beim SmartBird
der Firma Festo wird die Verwindung jeder Flügelseite
mit einem Servo gesteuert (2011). Allerdings wird damit nur die Verwindung
im Handflügelabschnitt beeinflusst. Der innere Armflügelabschnitt
ist nicht verwindbar. Dort ist also der Auftrieb beim Aufschlag sehr klein
- trotz Abwinklung des Handflügels.
Die Spannweite des Modells beträgt 2,0 Meter, das Gewicht 0,450 kg, die Flächenbelastung 9 N/qm.
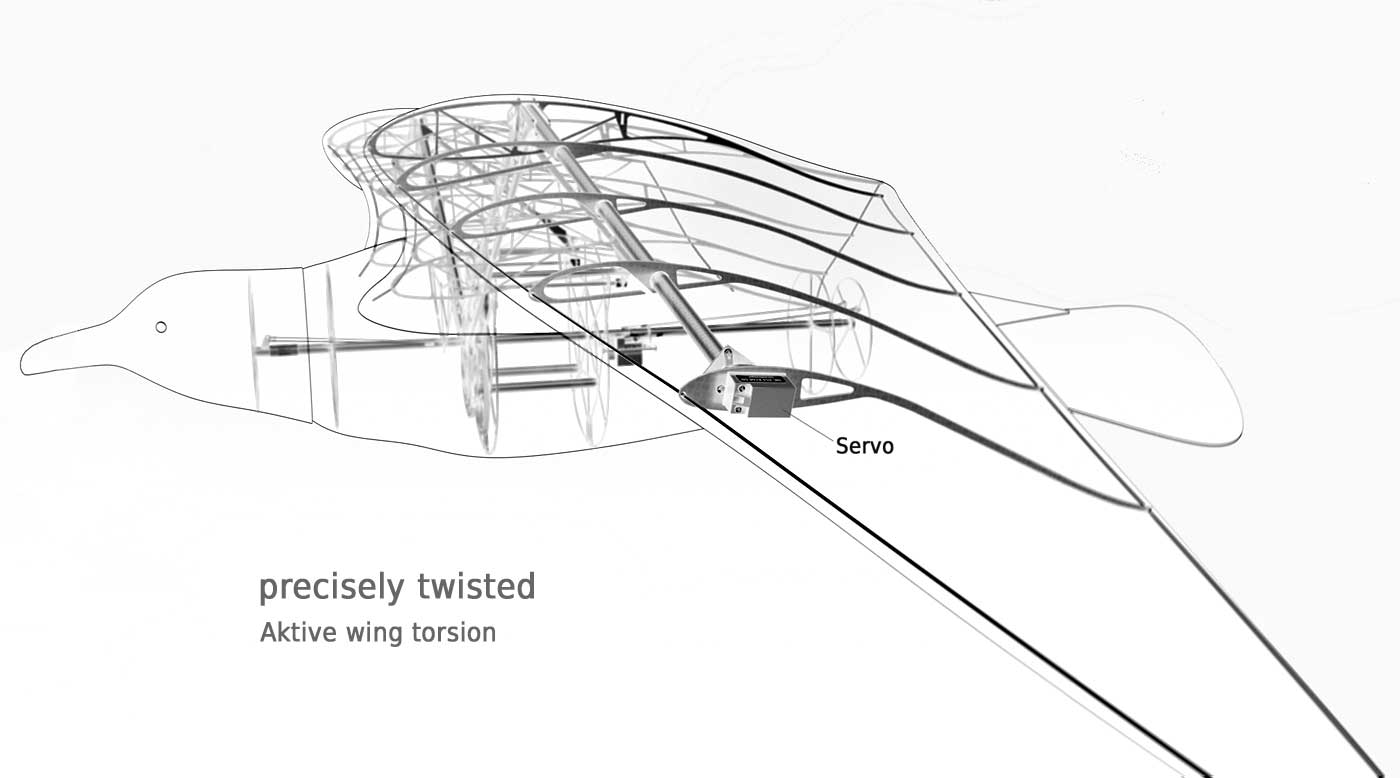
Die Bespannung besteht aus einer 2 mm dicken, extrudierten Polyurethanschaumplatte, welche zu einem Flügelprofil gebogen wurde (die bei dem Modell angewendeten Flügelquerschnitte unterscheiden sich von den hier abgebildeten Flügelrippen).
Ober- und Unterseite der Bespannung sind im Handflügelabschnitt hinten nicht miteinander verbunden. Sie können so aneinander gleiten und der Flügel die Verwindung faltenlos mitmachen (siehe Scherverwindungsprinzip im nächsten Abschnitt).


Beim SmartBird ist auffallend, dass mit der Flügelmechanik die Abwinkelung zwischen Arm- und Handflügel der Vögel nachgeahmt wird. Die nebenstehenden Bilder zeigen einen prinzipiellen Nachbau der Schlagflügelmechanik während des Auf- und des Abschlags. Sie können sich auch eine Animation (2,1MB) davon ansehen.
{kind=link}
Weitere Details über das SmartBird-Projekt, siehe weiterführender Link 12.
3.7 Scherverwindungsprinzip

Hier ein aeroelastisch verwindbarer Profilschlagflügel nach dem Scherverwindungsprinzip. Dieses System ermöglicht die Verwendung einer relativ unelastischen Bespannung. Bei nicht zu großer und konstanter Verwindung längs des Flügels ist die Profiltreue dabei sehr gut.
Die Verwindungselastizität wird hier hauptsächlich durch den als Flügelnase
ausgebildeten Holm bestimmt. Erfunden wurde dieses System von Professor
![]() James D. DeLaurier und Jeremy M. Harris (Kanada 1994).
James D. DeLaurier und Jeremy M. Harris (Kanada 1994).
Auch der Ornithopter mit seiner Dreiteilung des Schlagflügels ist interessant. Jeremy M. Harris hat ihn 1977 zum Patent angemeldet.

Auf nebenstehendem Bild sind James D. DeLaurier und Jeremy M. Harris mit ihren ferngesteuerten 3 Meter-Modell mit Verbrennungsmotor zu sehen. Ein längerer Flug wurde 1991 erzielt. Es gibt ein Video davon, siehe weiterführender Link 13.


Hier ist ein entsprechender Nachbau mit Elektroantrieb von Horst Händler (1994).
3.8 Schwingende Flügelspitzen



Beim Snowbird
hat der Hauptholm des Flügels kein Schlaglager. Stattdessen
ist der Holm elastisch und führt bei senkrechter Schwingung mit den Flügelspitzen
die gewünschte Schlagbewegung aus. Die Flügel verwinden sich dabei passiv
durch aerodynamische Kräfte.
Das Prinzip einer mit Seilzügen angetriebenen Flügelschwingung, hat insbesondere für manntragende Ornithopter deutliche Vorteile:
- ausfallsichere Flügelstellung für den Gleitflug
- geeignet für große Spannweiten mit entsprechend geringem induzierten Widerstand
- nur wenige bewegliche Teile
Todd Reichert hat den Snowbird maßgeblich mit entwickelt und ist auch erfolgreich damit geflogen. Es war der weltweit erste offiziell anerkannte, kurze Flug eines personenbetriebenen Ornithopters (Kanada 2010).
Mehr Informationen zum Human-Powered Ornithopter (HPO) Project Snowbird
,
siehe weiterführender Link 14.
3.9 Schalenflügel


.. mit aktiver Flügelverwindung durch eine vom Antrieb gesteuerte Holmdrehung, entwickelt von Albert Kempf (Frankreich 1998), siehe weiterführender Link 15.
Die Flügeloberseite besteht offensichtlich aus einer gewölbten Hartschale, die auf der Unterseite mit Schaumstoff zu einer profilierten Tragfläche geformt wird.
Eine lange dünne Platte mit gewölbtem Querschnitt
lässt sich leicht und faltenfrei verwinden. Auch der oben erwähnte Scherverwindungsflügel
nutzt diese Eigenschaft. Diese Schlagflügelkategorie wird hier als Schalenflügel
bezeichnet.
Der damit ausgestattete Truefly
ist nebenstehend zu sehen - ein Ornithopter
mit einem wunderschönen Flugbild. Es war auch der erste Ornithopter, der mit
Profilschlagflügeln kräftige Steigflüge erzielte.
4. Hinweise
Im Aufsatz Schlagflügelkonstruktionen
(PDF 1,8 MB) stehen weitere Informationen über obenstehende Schlagflügelkonstruktionen.
Die hier im Zusammenhang mit den EV-Modellen entwickelten Schlagflügel finden Sie auf der Seite Gelenkschlagflügel.
Die Flügel von Flugsauriern haben anders funktioniert als heutige Vogelflügel, siehe Arbeitsweise des Flügels eines Flugsauriers.
Anregungen und Vorschläge zur Weiterentwicklung enthält der Artikel
Auftrieb beim Flügelaufschlag, Version 10.1 (PDF 1,0 MB).
5. Weiterführende Links
zu anderen Schlagflügelkonstruktionen
- Alphonse Pénaud, (1850 - 1880):
https://web.archive.org/web/20190321124850/http://www.ctie.monash.edu.au/hargrave/penaud.html - Video über ein Schlagflügelmodell von Cenek Chalupsky:
http://ovirc.free.fr/Clips_video.php - Bauweise des Nurflügelmodells von Jean-Louis Solignac:
http://ovirc1.free.fr/solignac-ornitho.htm - Triebflügelmodell ENTOID von Velko T. Velkov:
http://velkovelkov.blogspot.com/2009/09/entoid.html - Das Doppel-Schlagflügelflugzeug von Karl-Heinz Helling fliegt:
https://www.modellbau-thiele.de/schlagfluegel.htm
und das Hubflügelprojekt:
http://www.mfc-rossendorf.de/fileadmin/user_upload/Projekt/Hubfluegel/Projekt/SchlagfluegelProjekt.htm - Zeppelin ohne Antriebsmotor
The Phoenix UAV
by the Centre for Process Innovation, National Printable Electronics Centre.
Im Video ab der Stelle 19:29
https://www.br.de/mediathek/video/gut-zu-wissen-19102019-pakete-per-lastenrad-stand-up-paddling-und-zugvoegel-fliegen-ohne-motor-av:5d78dc721f300600137ecc7c - Bericht über Percival H. Spencer:
http://www.seabee.info/spencer.htm - Der
Schwan 1
von Walther Filter im Luftfahrtmuseum Hannover-Laatzen,
zu sehen beiAir-Britain
:
https://abpic.co.uk/pictures/view/1166050 - Aufgefächerter Flügel vom
Vogelmann
Georges Fraisé:
http://ovirc.free.fr/GFraise.php - Nahaufnahme einer orangefarbenen Libelle:
http://www.grahamowengallery.com/photography/dragonfly_photography.html - Nachbildung eines Pterosaurier von Paul McCready:
http://ovirc.free.fr/McCready.php
The Great Pterodactyl Project:
http://calteches.library.caltech.edu/596/2/MacCready.pdf (1,6MB) SmartBird
der Firma Festo (Fabrik-und Prozessautomatisierung):
https://www.festo.com/group/de/cms/10238.htm- Video vom Flug des Modells der Machbarkeitsstudie
für einen bemannten Ornithopterflug von James D. DeLaurier:
http://www.ornithopter.net/MediaGallery/Videos/index_e.html - Human-Powered Ornithopter (HPO) Project
Snowbird
von Todd Reichert:
http://hpo.ornithopter.net/
Technische Informationen mit einer Übersichtszeichnung vomSnowbird
:
http://www.aerovelo.com/snowbird-technical-info/
Todd Reichert's DoktorarbeitKinematic Optimization in Birds, Bats and Ornithopters
https://tspace.library.utoronto.ca/handle/1807/31913 - Ornithoptermodell
Truefly
von Albert Kempf:
http://truefly.chez.com/